High-order extended Kalman filter design method based on maximum correlation entropy
A technique of extended Kalman and maximum correlation entropy, applied in the field of high-order extended Kalman filter design, which can solve problems such as divergence and filter performance degradation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
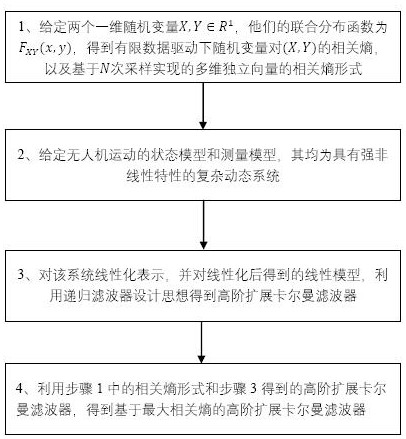
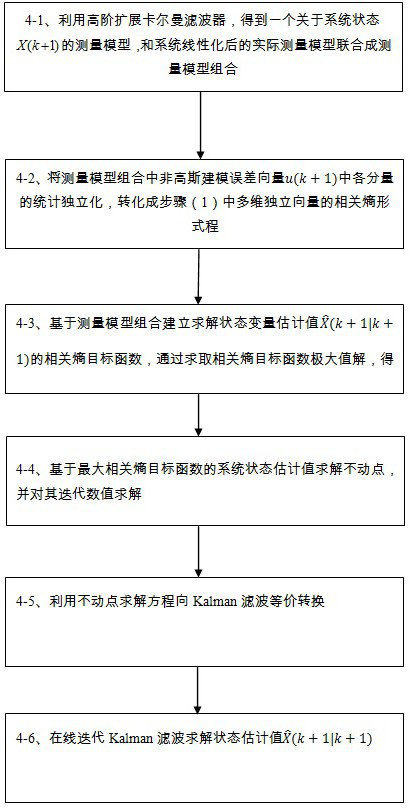
[0173] Embodiment 1 considers that the state equation is a high-order polynomial, and the measurement equation is a UAV motion system with a linear model
[0174]
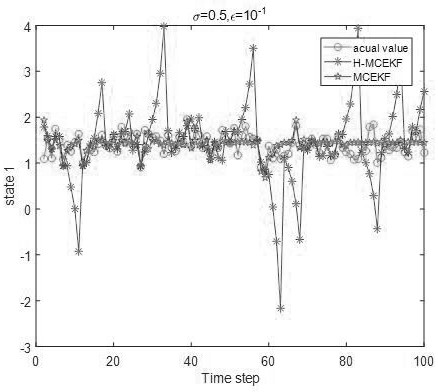
[0175] Among them, w(k+1)~0.8N(0,0.01)+0.2N(0,0.1), and v(k+1)~N(0,0.01), the initial value x(0)=[1 1] T , the initial estimate of Initial estimation error covariance P(0|0)=0.01×diag(1,1).
[0176] Using MCEKF and the proposed H-MCEKF two filtering methods to estimate the state variables in two cases, compare the estimated values of displacement and velocity and the estimation errors of displacement and velocity. The accuracy rates of MCEKF and H-MCEKF were calculated for comparison.
Embodiment 2
[0177] Embodiment 2 The state equation and the measurement equation are all UAV motion systems in the form of high-order polynomials
[0178]
[0179] Among them, w 1 (k)~N(0,0.01),w 2 (k)~N(0,0.01),w 1 (k) and w 2 (k) is an uncorrelated Gaussian white noise sequence, v(k+1)~0.8N(0,0.01)+0.2N(0,0.1), initial value x(0)=[1 1] T , the initial estimate of Initial estimation error covariance P(0|0)=0.01×diag(1,1).
[0180] Using MCEKF and the proposed H-MCEKF two filtering methods to estimate the target state variables in two cases, compare the estimated values of displacement and velocity and the estimation errors of displacement and velocity. The accuracy rates of MCEKF and H-MCEKF were calculated for comparison.
[0181] Embodiment 1 takes case one σ=0.5, ε=10 respectively -1 And case two σ=3,ε=10 -4 As an example, two filtering methods, MCEKF and H-MCEKF, are given to estimate the motion state of the UAV, such as Figure 3 to Figure 8 shown. Table 1 summarize...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com