A method and system for improving the safety of the motion speed of an industrial robot
A technology for robot motion and safety, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as robot motion interference, unsafe factors, and enhanced sensors, so as to enhance anti-noise capability, reduce signal sampling data, and reduce The effect of data drift
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
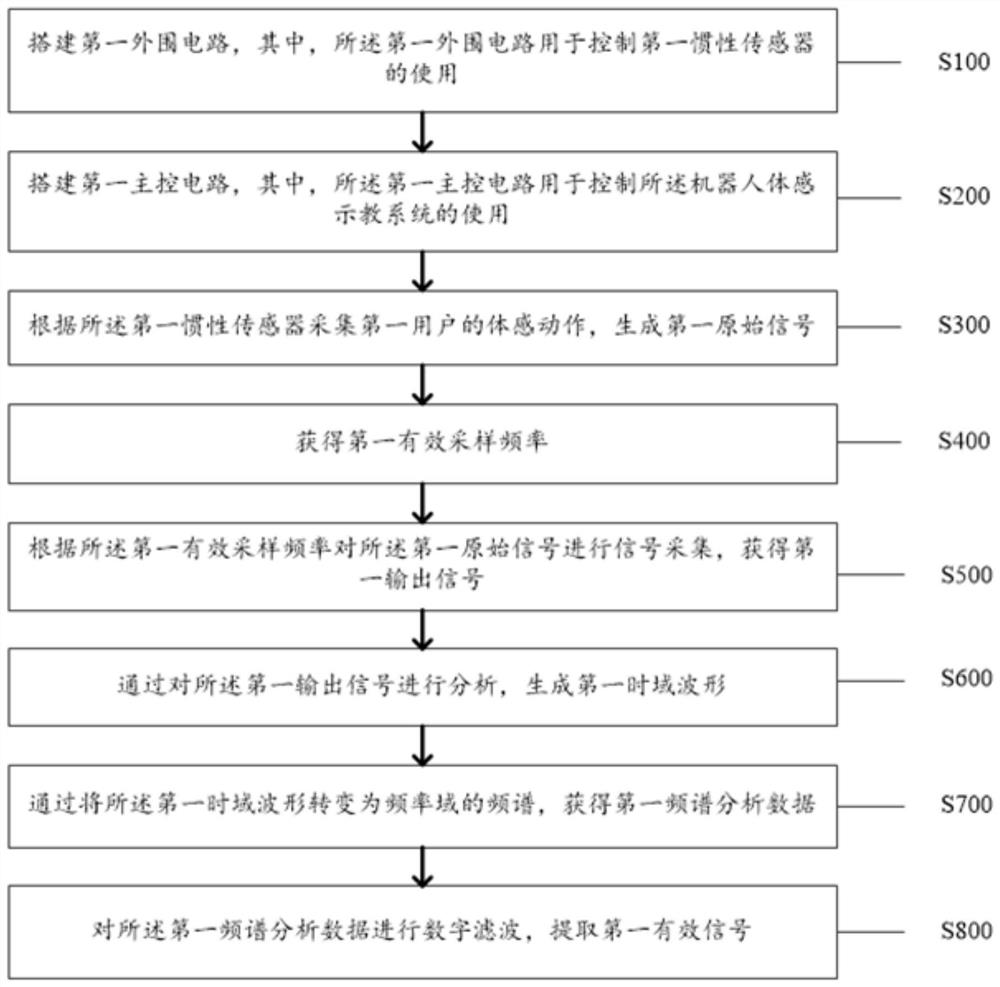
[0024] Such as figure 1 As shown, the embodiment of the present application provides a method for improving the safety of the motion speed of an industrial robot. The method is applied to a robot somatosensory teaching system, and the robot somatosensory teaching system is connected to an inertial sensor in communication. The method includes :
[0025] Step S100: Build a first peripheral circuit, wherein the first peripheral circuit is used to control the use of the first inertial sensor;
[0026] Specifically, the construction of the first peripheral circuit is the key factor for the superior performance of the sensor. Since the output terminals of the sensor are very small signals, if the useful signal is interfered due to the influence of noise, it will affect the subsequent The accuracy of signal processing, so it is particularly important to strengthen the anti-interference design of the sensor circuit. Among them, the noise of the sensor circuit mainly includes low-freq...
Embodiment 2
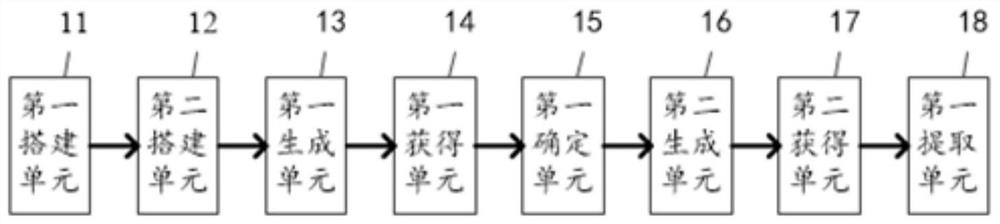
[0078] Based on the same inventive idea as a method for improving the safety of the motion speed of an industrial robot in the foregoing embodiments, the present invention also provides a system for improving the safety of the motion speed of an industrial robot, such as figure 2 As shown, the system includes:
[0079] A first building unit 11, the first building unit 11 is used to build a first peripheral circuit, wherein the first peripheral circuit is used to control the use of the first inertial sensor;
[0080] The second building unit 12, the second building unit 12 is used to build the first main control circuit, wherein the first main control circuit is used to control the use of the robot somatosensory teaching system;
[0081] A first generating unit 13, the first generating unit 13 is configured to collect the first user's somatosensory action according to the first inertial sensor, and generate a first original signal;
[0082] A first obtaining unit 14, the firs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com