On-demand auxiliary rehabilitation robot training method based on Bayesian optimization
A rehabilitation robot and training method technology, applied in the field of rehabilitation robots, can solve the problems of not considering the fixed reference trajectory, not considering the optimization of the auxiliary force field strength, not considering drawing, etc., to promote participation, improve sports ability, and reduce burden Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
[0036] The present invention proposes an on-demand auxiliary rehabilitation robot training method based on Bayesian optimization. The method of the present invention can effectively improve the variability of the task, and can realize the improvement of the user's athletic ability by the device through a shorter cycle process. Adaptability reduces the workload of the therapist and effectively improves the efficiency of rehabilitation.
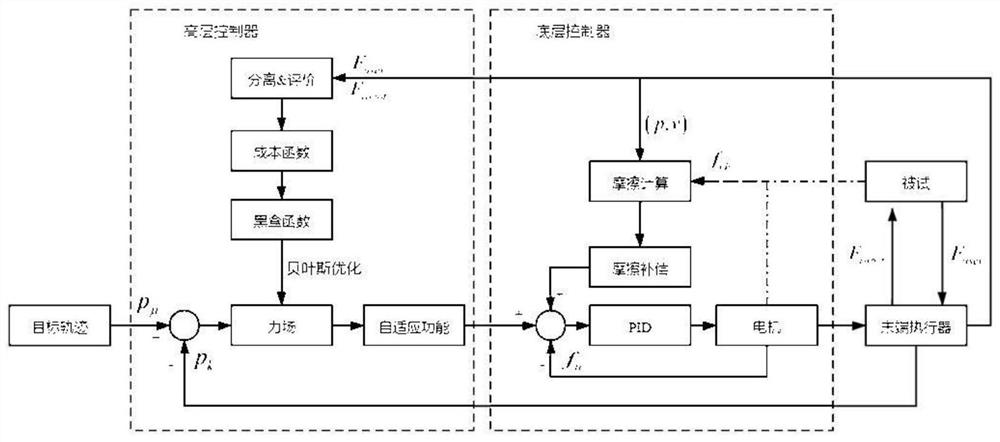
[0037] like figure 1 As shown, a kind of adaptive on-demand auxiliary training method based on Bayesian optimization provided by the example of the present invention comprises the following steps:
[0038] 1. Familiarization stage:
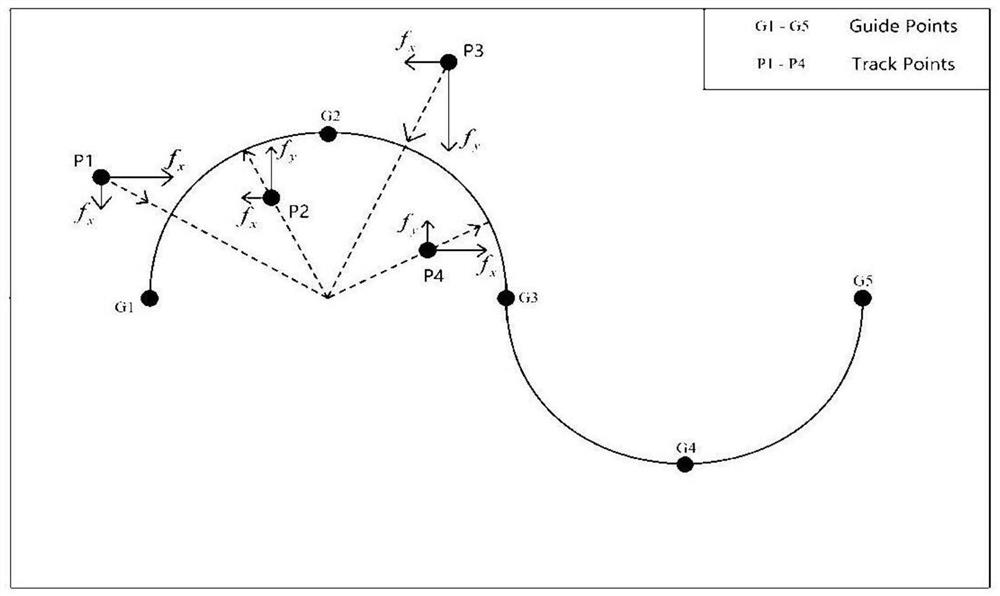
[0039]The therapist / technician will explain the trajectory-following task to the subjects, including the shape of the expected trajectory, the position of the guide point, the star...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com