An automatic direction adjustment device suitable for a pipeline inspection robot and a direction adjustment method thereof
A technology for inspection robots and pipelines, applied in the direction of pipe components, special pipes, mechanical equipment, etc., can solve the problems of interference of detection results, overturning of pipeline robots, and unfavorable detection work of pipeline robots, so as to improve accuracy, precise detection work, avoid overturning effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions of the present invention will be clearly and completely described below with reference to the accompanying drawings.
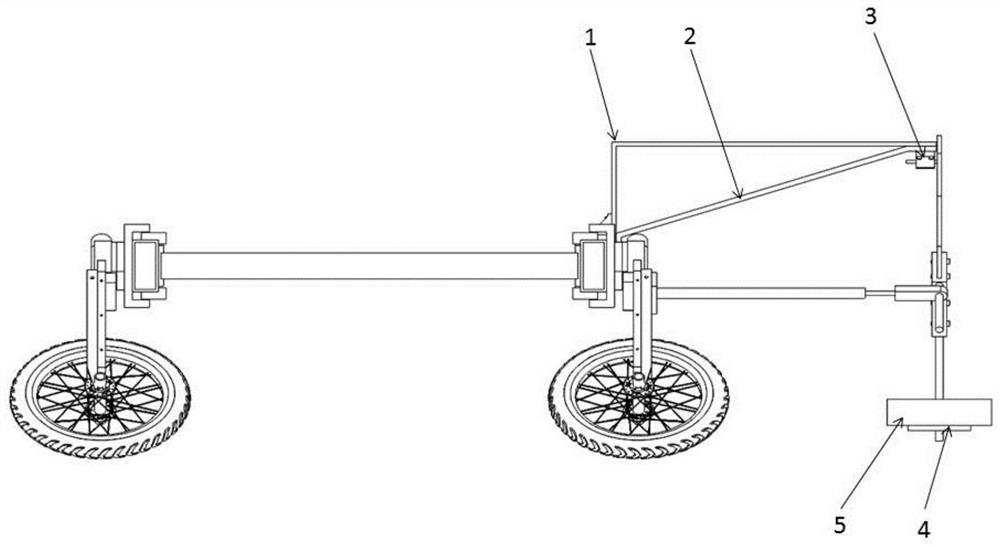
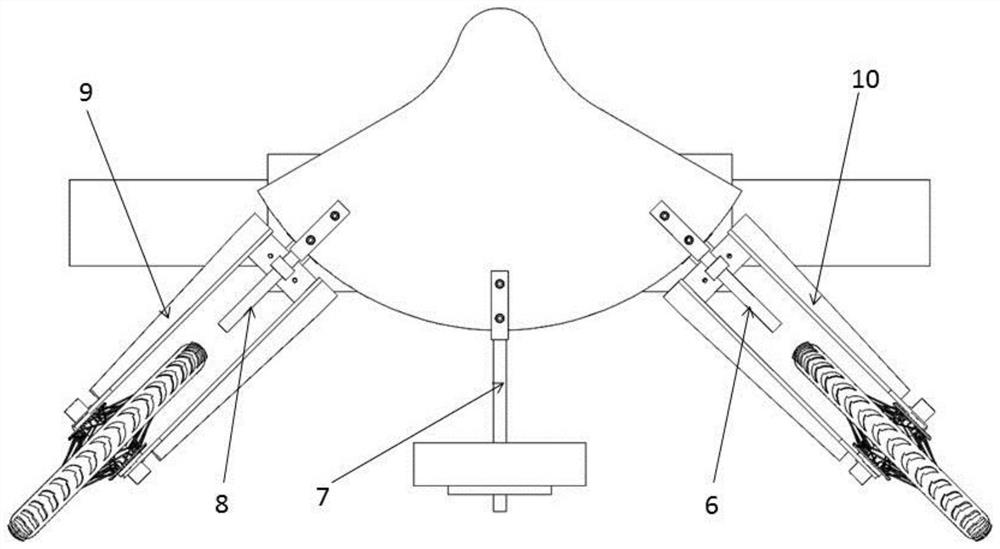
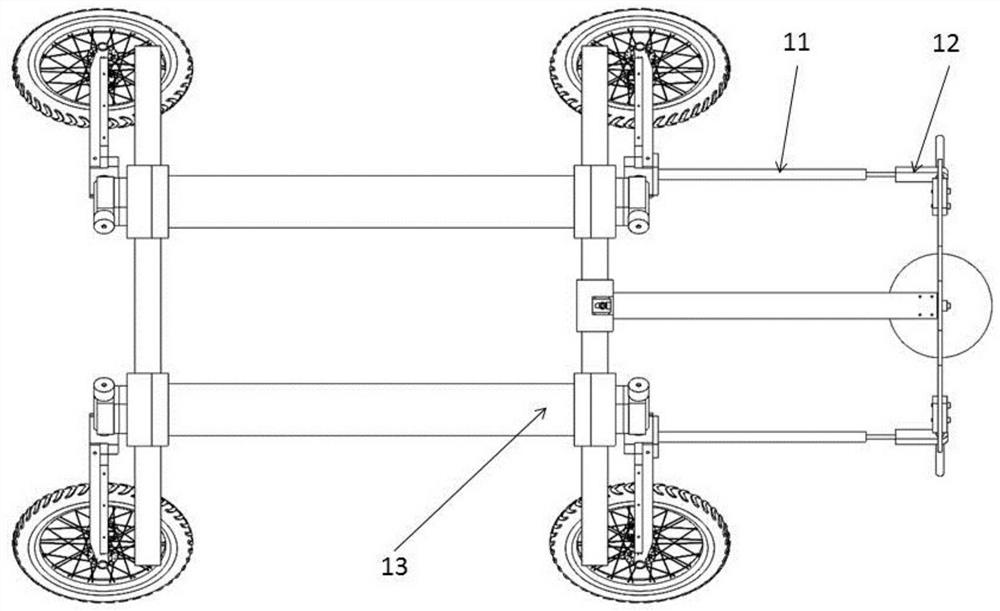
[0025] like figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 As shown in the figure, an automatic direction adjusting device suitable for a pipeline inspection robot includes a fan-shaped plate 14, a weight fork shaft 7, a weight block 5, a left sliding fork shaft 6, a left connecting rod 12, a left turning arm 11, a right sliding Fork shaft 8, right connecting rod 15, right rotating arm 16, rotating shaft, bearing seat 3 and L-shaped fixing plate 1; the bottom of sector plate 14 is fixedly connected with the top of weight fork shaft 7 by screws, and weight 5 is connected with weight The bottom of the fork shaft 7 is fixed; the tops of the left sliding fork shaft 6 and the right sliding fork shaft 8 are fixedly connected with the sector plate 14 by screws; On both sides of the fork shaft 7; one end of the left conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com