Multiple-underwater-robot autonomous task allocation method based on space-based center
A technology of underwater robot and distribution method, which is applied in the direction of instruments, non-electric variable control, height or depth control, etc., and can solve problems such as poor system robustness, inability to complete sudden tasks, and centralized solution to the large calculation load of central nodes. Achieve the effects of wide application range, improved reliability and robustness, and improved efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
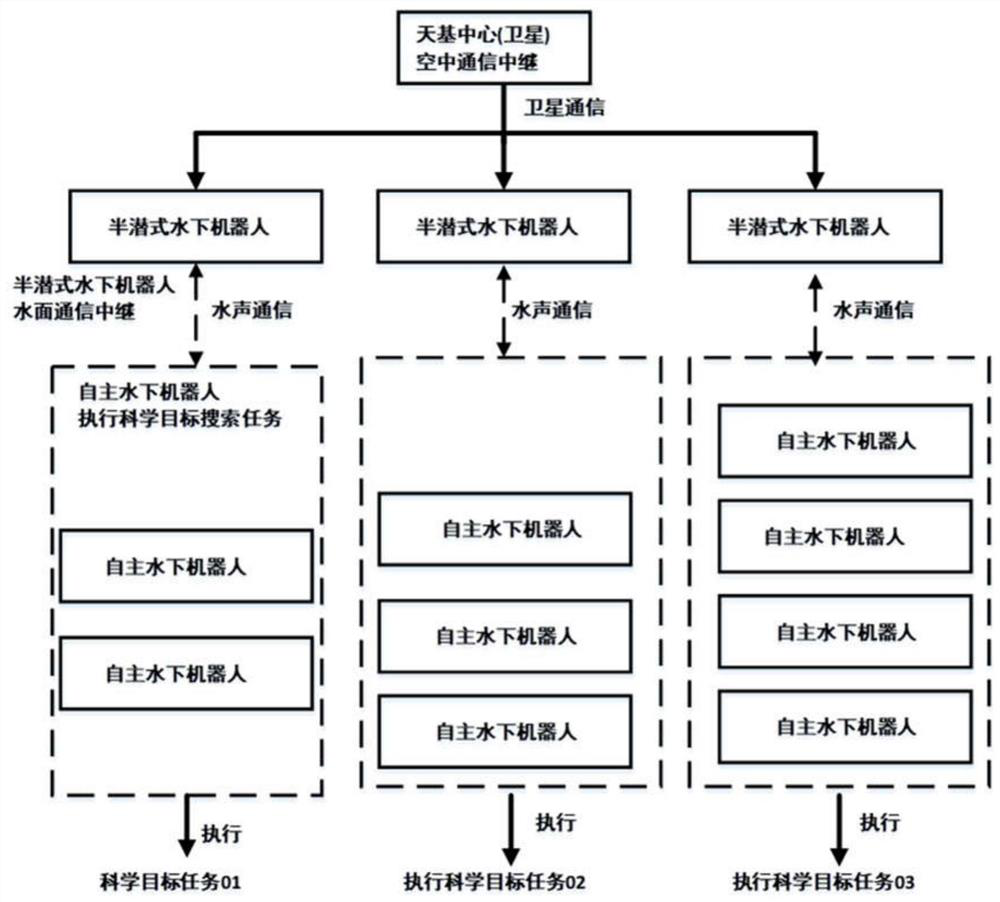
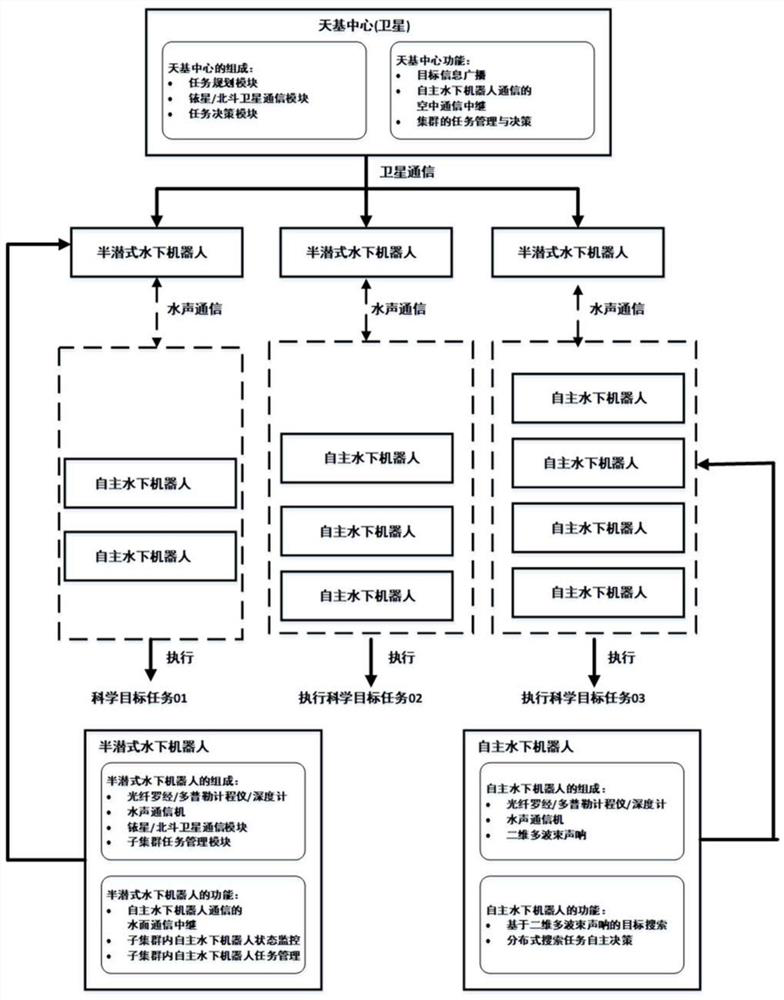
[0042] The entire system consists of space-based satellites, semi-submersible underwater robots, and autonomous underwater robots. The role of space-based satellites is to broadcast multi-science suspected target information in a wide area of the sea; An autonomous underwater robot that performs scientific suspected target search tasks underwater; the function of an autonomous underwater robot is to perform scientific suspected target search tasks underwater. The system composition is as follows: figure 1 shown.
[0043] The workflow of the whole system is as follows: First, the satellite broadcasts the discovered multi-scientific targets to the semi-submersible underwater robot, and the semi-submersible underwater robot uses the underwater acoustic communicator to broadcast the target information to the autonomous underwater robot that perf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com