Intrinsic safety design method for collaborative robot
A design method and intrinsically safe technology, applied in manipulators, manufacturing tools, etc., can solve the problems of less research on the safety design of collaborative robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
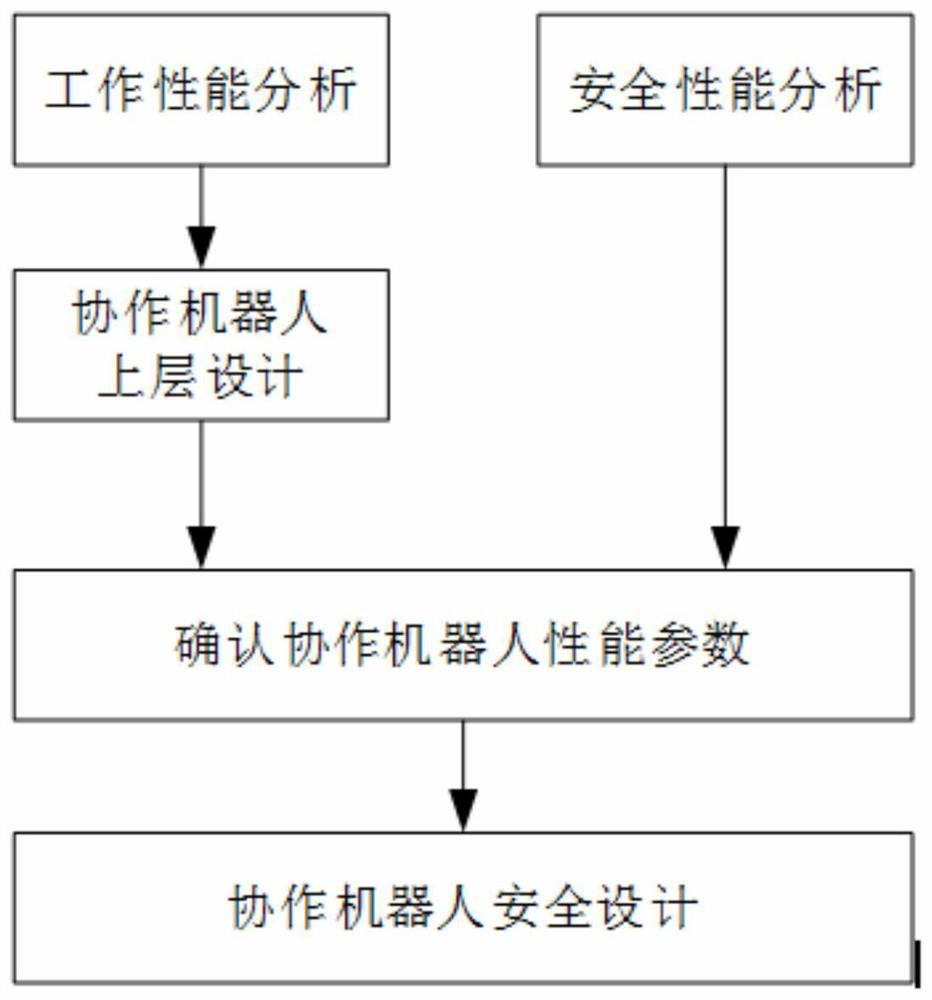
Embodiment 1
[0100] The specific process of this embodiment is as follows:
[0101] Step 1: Analysis of the working performance of the collaborative robot.
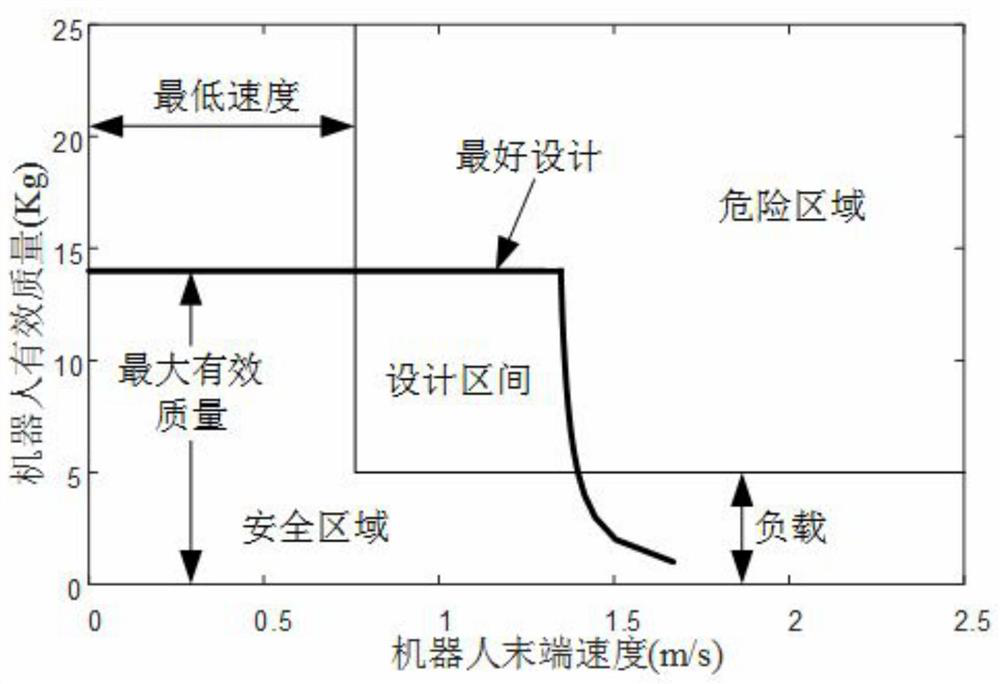
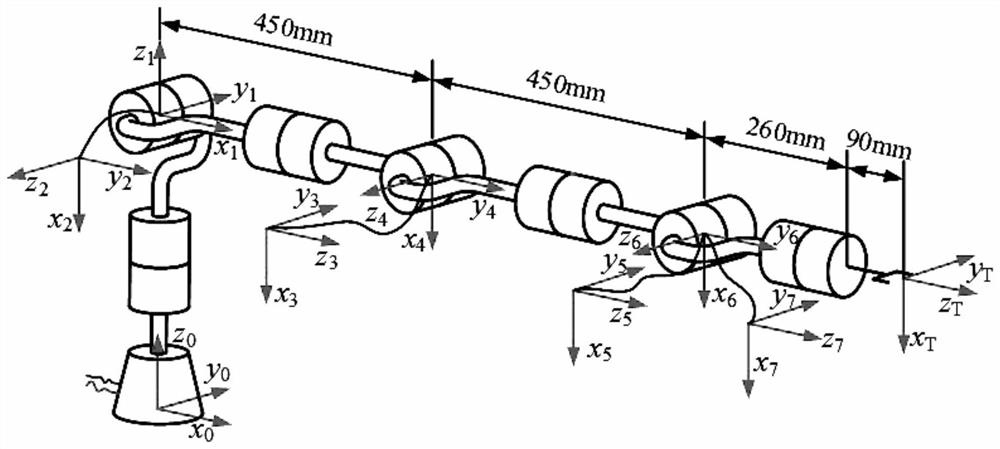
[0102]According to the requirements of collaborative robots and humans sharing the working space, select robot tasks, mainly to perform 3C assembly, testing, sorting and other tasks (load 0.5Kg ~ 20Kg, robot terminal speed greater than 10m / s), according to the tasks of collaborative robots The task determines the specific parameter values of the relevant performance indicators of the robot, including the degree of freedom, working space, and accuracy of the robot. In this embodiment, the degree of freedom of the robot is 7, the working space is 900mm, the precision is ±0.1mm (repeatability and accuracy of the pose of the robot end), and the load is 5Kg.
[0103] Step 2: Design the upper layer of the collaborative robot, and optimize the robot according to the index parameter values determined in step 1.
[0104] Step 2.1. Accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com