Method and device for measuring pose repetition precision of robot actuator
A technology of repeatability and measurement method, applied in measuring devices, optical devices, instruments, etc., can solve the problems of large fluctuation, high price, and inability to characterize the repeatability of robot actuators.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the above objects, features and advantages of the present application more obvious and comprehensible, the present application will be further described in detail below in conjunction with the accompanying drawings and specific implementation methods.
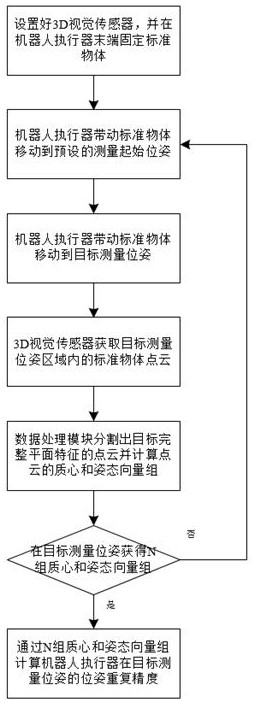
[0035] The present invention provides a method for measuring the repeatability accuracy of the position and posture of a robot actuator. The method for measuring the repeatability accuracy of the pose and posture of a robot actuator includes the following steps:
[0036] Step 1, before the measurement, set up the 3D vision sensor, and fix the standard object at the end of the robot actuator; the standard object includes M planar features with an area larger than the set value, M≥1 and is an integer, the robot When the end of the actuator drives the standard object to move to the target measurement pose, the 3D vision sensor can capture at least one area including complete plane features; in this step, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com