Three-dimensional laser point cloud rapid repositioning method
A three-dimensional laser and repositioning technology, applied in image analysis, image enhancement, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
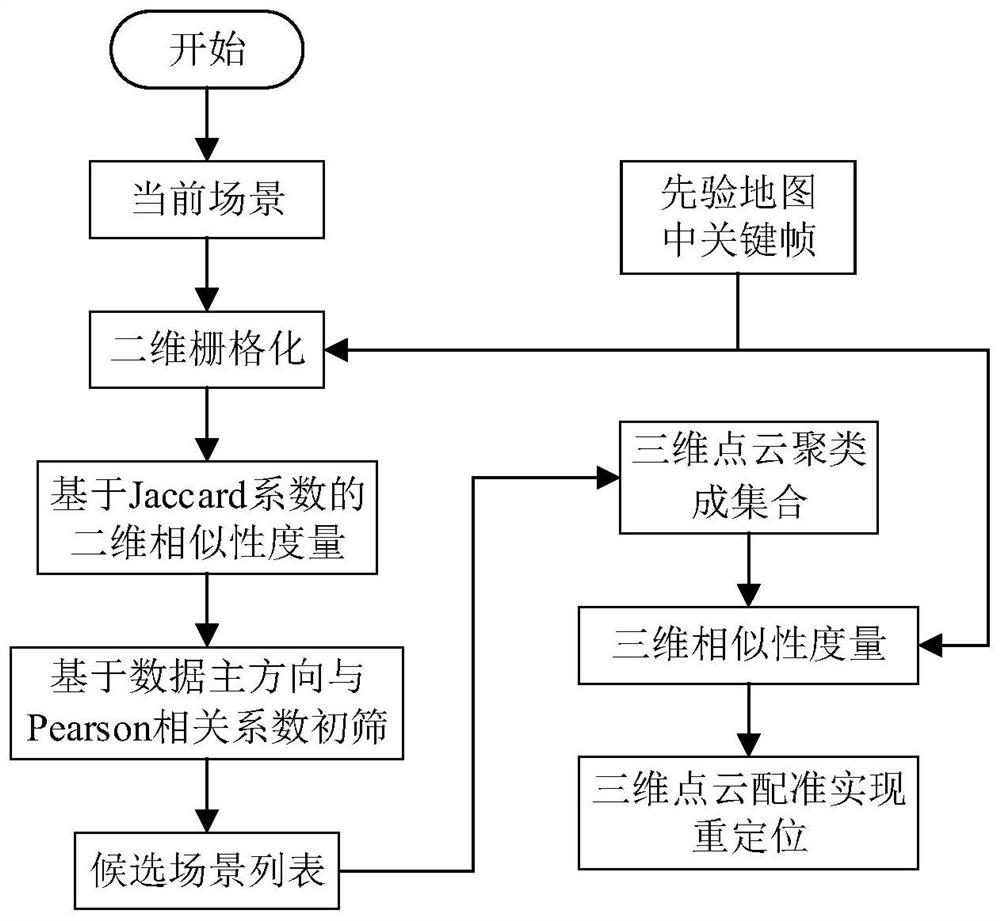
[0095] Such as figure 1 As shown, a 3D laser point cloud fast relocation method includes the following steps:
[0096] Step 1. Perform two-dimensional rasterization processing on the original laser image point cloud that has been segmented into the current scene, specifically:
[0097] Step 1-1, the segmented original point cloud of the current frame is removed from the ground point cloud and the snow surface point cloud;
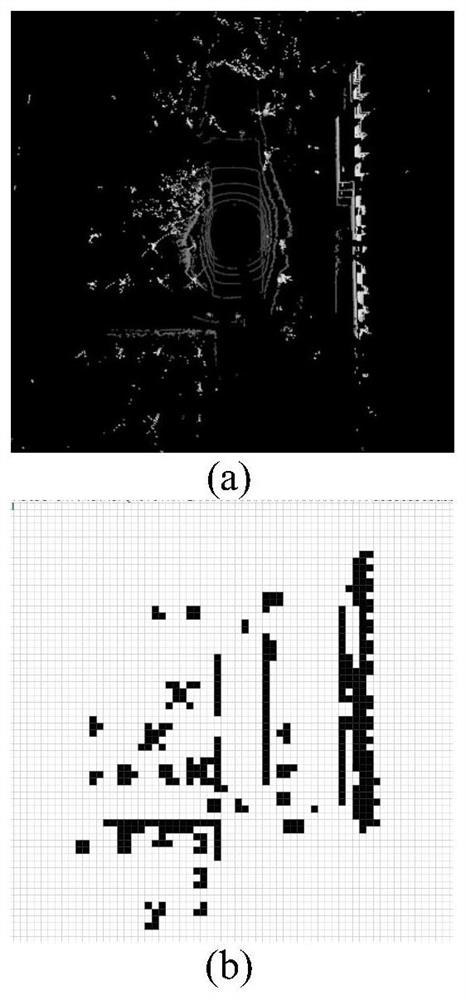
[0098] Step 1-2, such as figure 2 As shown, the centralized processing of the point cloud:
[0099]
[0100] In the formula, the projection grid size is N×N, N=range / res, the lidar observation range is range, the two-dimensional grid resolution is res, and the coordinates of a point in the original point cloud are (p x ,p y ,p z ), the coordinates (x, y, z) after projection;
[0101] Steps 1-3, describe the point cloud in the current frame as p 1 =(x 1 ,y 1 ,z 1 ), p 2 =(x 2 ,y 2 ,z 2 ),...,p n =(x n ,y n ,z n ), determine the centroid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com