Mobile robot control method and device, mobile robot and storage medium
A mobile robot and control method technology, applied in the field of robotics, can solve problems such as the inability to obtain road surface information, and achieve the effect of broadening application scenarios and improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
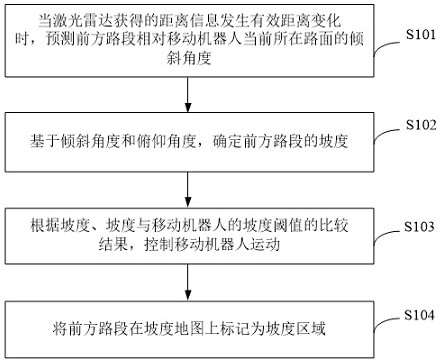
[0059] figure 2 It is a schematic flowchart of the control method of the mobile robot provided in Embodiment 1 of the present application. The method of this embodiment can be executed by the control device of the mobile robot provided in the embodiment of the present application, and the device can be realized by software and / or hardware , and can be integrated into mobile robots. Such as figure 2 As shown, the control method of the mobile robot of the present embodiment includes:
[0060] S101. When the effective distance changes in the distance information obtained by the laser radar, predict the inclination angle of the road ahead relative to the road where the mobile robot is currently located.
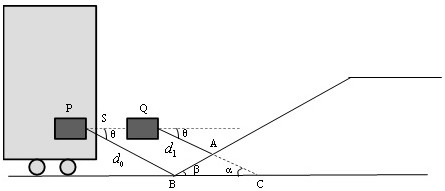
[0061] As an example, assuming that the mobile robot is moving on a horizontal road surface (current road surface), the distance measured by the lidar is used as d 0 Indicates that when encountering an uphill slope, the measured distance d 1 d 0 , when encountering a dow...
Embodiment 2
[0134] Figure 7 A schematic diagram of the structure of the control device of the mobile robot provided in Embodiment 2 of the present application, as shown in Figure 7 As shown, the control device 10 of the mobile robot in this embodiment includes:
[0135] Slope prediction module 11 and motion control module 12.
[0136] The slope prediction module 11 is used to predict the inclination angle of the road ahead relative to the current road surface of the mobile robot when the distance information obtained by the laser radar changes effectively; based on the inclination angle and the pitch measured by the inertial measurement unit Angle, to determine the slope of the road ahead;
[0137] The motion control module 12 is used to control the movement of the mobile robot according to the gradient, the comparison result of the gradient and the gradient threshold of the mobile robot; the road section ahead is marked as a gradient area on the gradient map, the The slope map is us...
Embodiment 3
[0173] Figure 8 A schematic structural diagram of a mobile robot provided in Embodiment 3 of the present application, such as Figure 8 As shown, the mobile robot 20 includes:
[0174] Lidar 21 , inertial measurement unit 22 and data processing center 23 . The laser radar 21 and the inertial measurement unit 22 are respectively connected in communication with the data processing center 23 to send the collected data to the data processing center 23 .
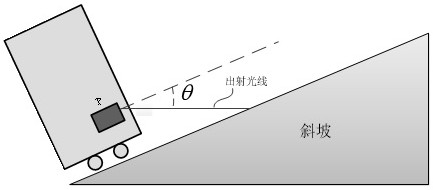
[0175] Wherein, the laser radar 21 may be a single-line laser radar, or may be a multi-line laser radar. The laser radar is installed parallel to the chassis of the mobile robot, and the light beam emitted by the laser radar forms a fixed angle with the horizontal ground to measure the distance between the laser radar and the road surface.
[0176] The inertial measurement unit 22 is a device for measuring the orientation and attitude of the moving carrier through an accelerometer and a gyroscope. In this embodiment, the iner...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com