Flexible mechanical arm system for deep cavity operation and continuum robot
A flexible manipulator, deep cavity operation technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult design layout, few degrees of freedom, large structure size, etc., to meet monitoring and maintenance tasks, The effect of many controllable degrees of freedom and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0051] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0052] Aiming at the problems existing in the prior art, the present invention provides a flexible manipulator system for deep cavity operation. The present invention will be described in detail below with reference to the accompanying drawings.
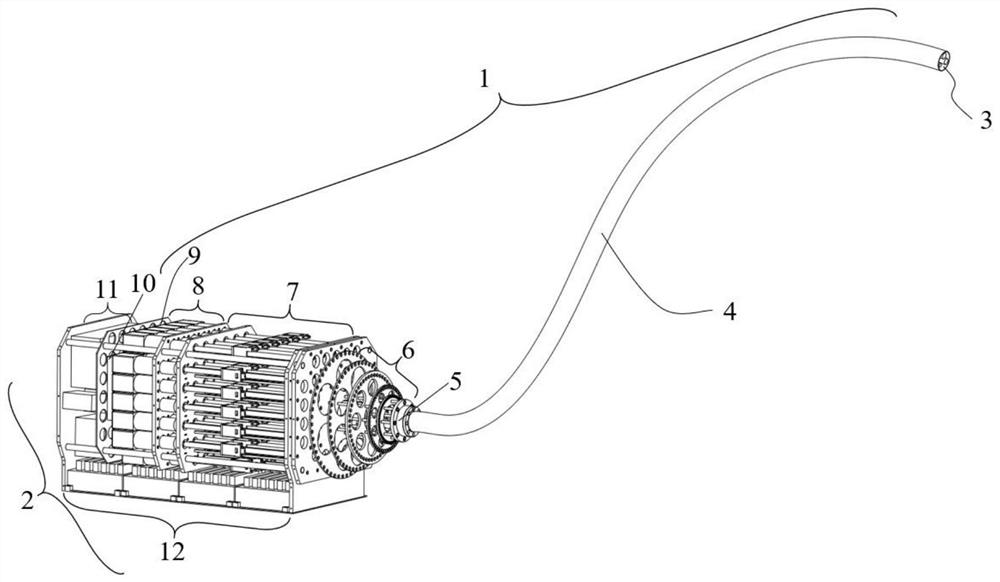
[0053] Such as figure 1 As shown, the flexible manipulator system for deep cavity operation provided by the embodiment of the present invention includes a functional end 1 and a control end 2;
[0054] Functional end 1 includes:
[0055] The flexible manipulator module 4 uses a set of criss-cross nickel-titanium alloy plates as the structural main frame, in which the number of s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com