Mobile robot infrared target tracking method and system based on unsupervised optical flow network
A mobile robot and infrared target technology, which is applied in the field of mobile robot infrared target tracking, can solve the problems of wasting video feature information, poor tracker performance, and insufficient use of optical flow information, etc., to achieve improved tracking effects and real-time algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
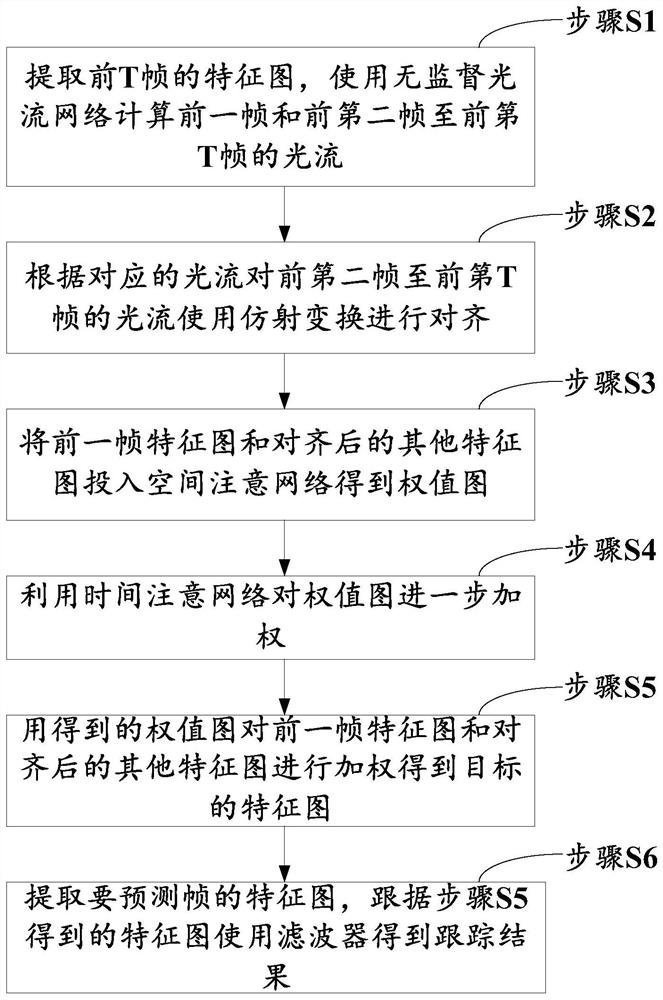
[0043] Such as figure 1 As shown, the present invention discloses a mobile robot infrared target tracking method based on an unsupervised optical flow network, including performing the following steps in sequence:
[0044] Step S1: extract the feature map of the previous T frame, and use the unsupervised optical flow network to calculate the optical flow of the previous frame and the previous second frame to the previous T frame;
[0045] Step S2: according to the corresponding optical flow, use affine transformation to align the optical flow of the previous second frame to the previous T frame;
[0046] Step S3: put the feature map of the previous frame and other aligned feature maps into the spatial attention network to obtain the weight map;
[0047] Step S4: use the temporal attention network to further weight the weight map;
[0048] Step S5: Use the obtained weight map to weight the feature map of the previous frame and other aligned feature maps to obtain the feature ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com