Rotary anti-swing control method of mobile hoisting equipment
A technology of hoisting equipment and control methods, which is applied in the directions of transportation, packaging, and load hanging components, and can solve the problems of unsuitable dynamic analysis and anti-sway control of mobile cranes, difficulties in fast and accurate positioning of hoisting weights, and inability to directly act
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0050] The drawings constituting a part of the present invention are used to provide a further understanding of the present invention, and the schematic embodiments and descriptions of the present invention are used to explain the present invention, and do not constitute an improper limitation of the present invention.
[0051] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
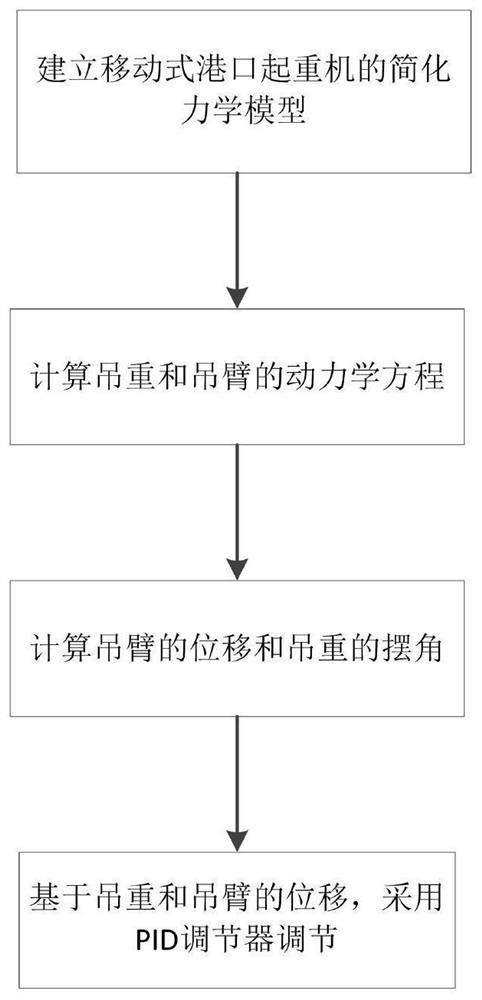
[0052] Such as figure 1 As shown, this embodiment provides a rotation anti-sway control method for mobile hoisting equipment, which specifically includes the following steps:
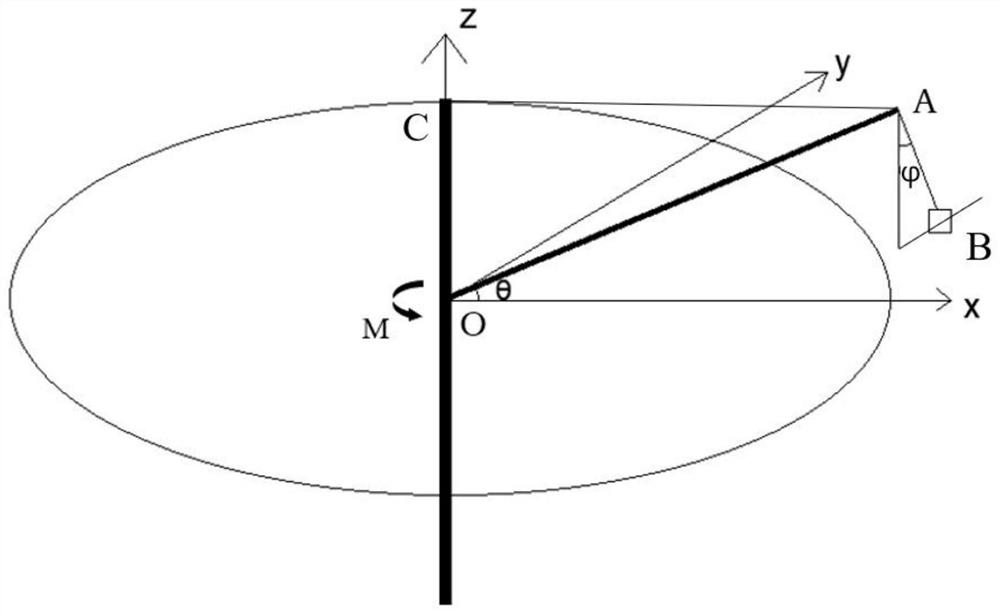
[0053] S1: Establish a simplified mechanical model of the mobile harbor crane;
[0054] S2: Carry out dynamic analysis on the swing of the hoisting weight according to the Lagrangian equation, and derive the dynamic equation of the weight motion;
[0055] S3: Based on MATLAB, the dynamic simulation of the hoisting movement is carried out, and the motion trajector...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com