A modular flexible instrument arm for a minimally invasive surgical robot
A technology of minimally invasive surgery and robotics, applied in surgical robots and other directions, it can solve problems such as errors in the surgical process, low flexibility of the instrument arm, and harm to patients, and achieve the effect of improving the flexibility of movement, increasing the degree of freedom, and facilitating disassembly and assembly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
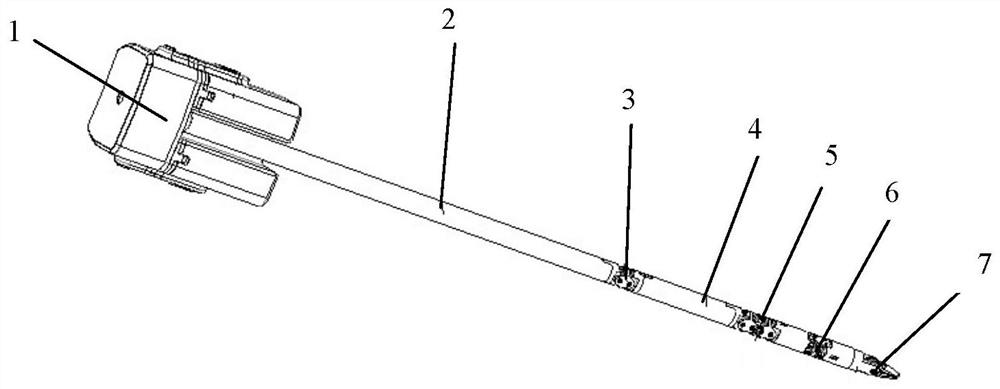
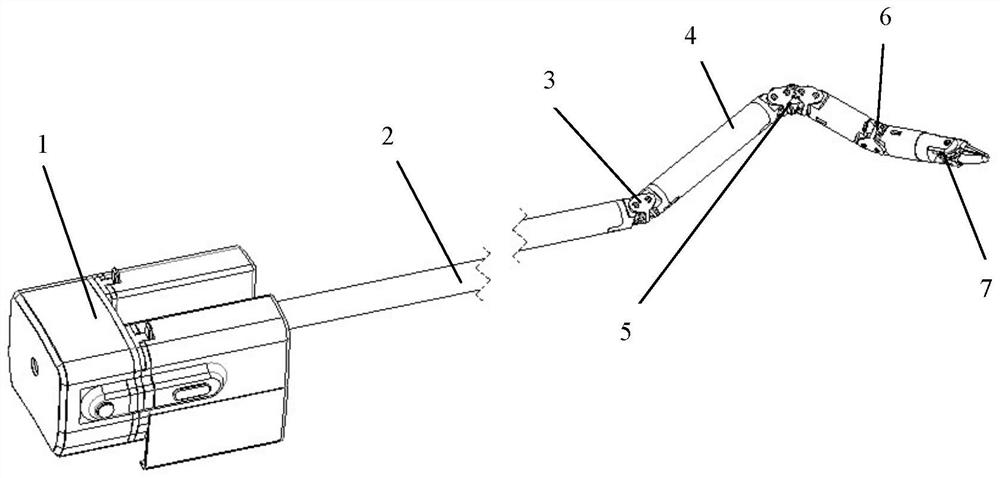
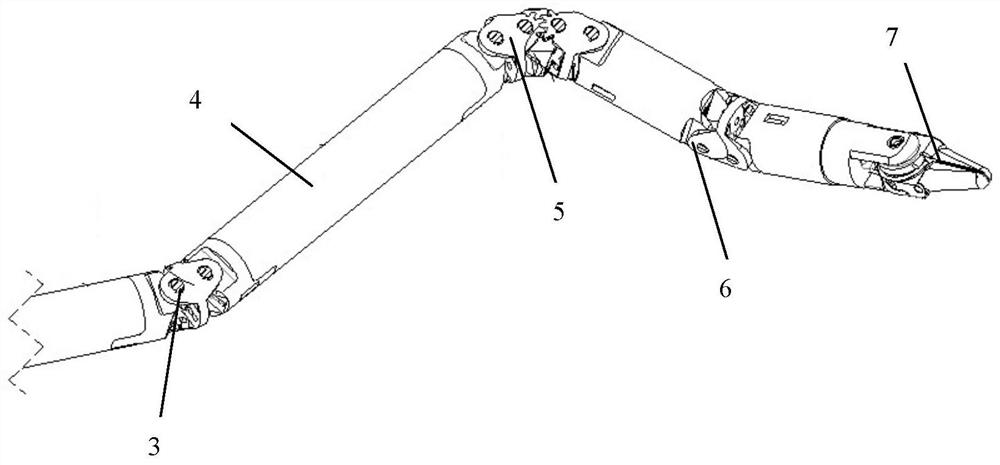
[0051] In a further embodiment of the present invention, the first connecting part 3 is a single-module joint, the second connecting part 5 is a double-module joint, and the third connecting part 6 is a single-module joint.
[0052] In a further embodiment of the present invention, one end of the first guide rod part 2 is fixedly connected with the driving part 1 .
[0053] In a further embodiment of the present invention, one end of the second rod guide part 4 is operable to rotate around the other end of the first guide rod part 2 through the first connecting part 3 .
[0054] In a further embodiment of the present invention, the third connecting part 6 is operable to rotate around the other end of the second guide rod part 4 through the second connecting part 5 .
[0055] In a further embodiment of the present invention, the surgical tool part 7 is operatively rotatable via the third connecting part 6 .
[0056] In a further embodiment of the present invention, the joint r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com