Multi-unmanned aerial vehicle task allocation method based on improved ant colony algorithm
An ant colony algorithm and task allocation technology, applied in computing, computing models, artificial life and other directions, can solve the problems of shortening the flight distance of UAV search tasks, reducing the time to complete the task, and long flight distance of UAVs. The calculation speed is fast, the time of task assignment is reduced, and the effect of shortening the flight distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037] Below in conjunction with accompanying drawing, further describe the present invention through embodiment, but do not limit the scope of the present invention in any way.
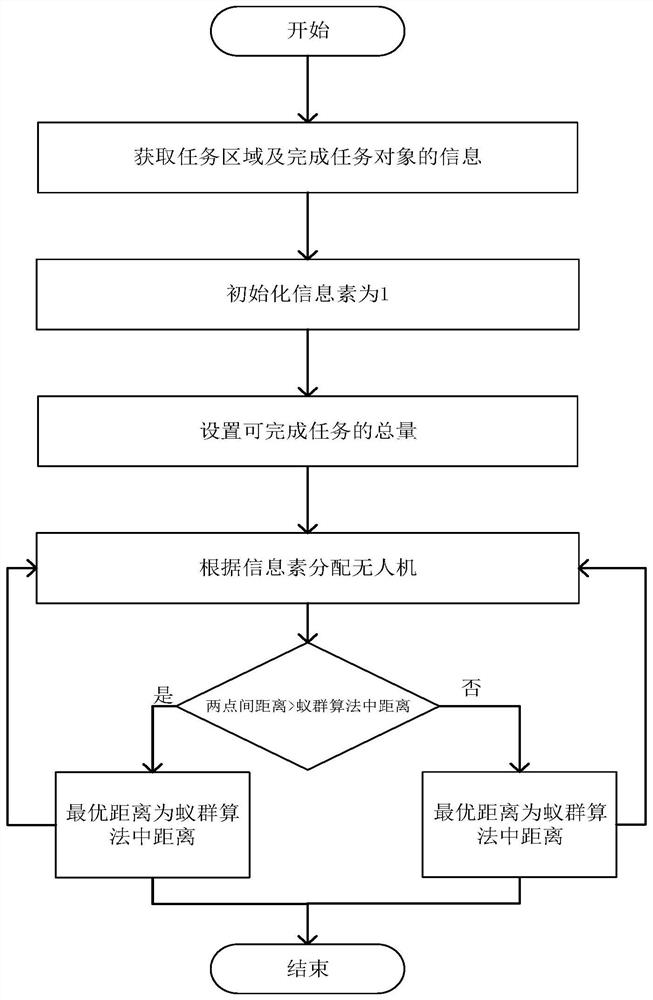
[0038] The present invention proposes a method for improving the ant colony algorithm, which is used for task assignment of multiple drones, expresses each drone as an ant in the improved ant colony algorithm, and compares the path distance calculated by the ant colony algorithm Compared with directly calculating the linear distance between two points, the shorter distance is selected as the optimal path for the UAV to find the target, which is suitable for the task allocation problem of multiple UAVs.
[0039] figure 1 It is a block flow diagram of the multi-unmanned aerial vehicle task assignment method of the improved ant colony algorithm provided by the present invention. During specific implementation, the inventive method specifically includes the following execution steps:
[0040] 1) Obtain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com