Efficient sorting method of robot
A robotic and efficient technology, applied in the field of robotics, can solve problems such as complex algorithm inspections, and achieve the effect of simplifying motion calculations and preventing mutual collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
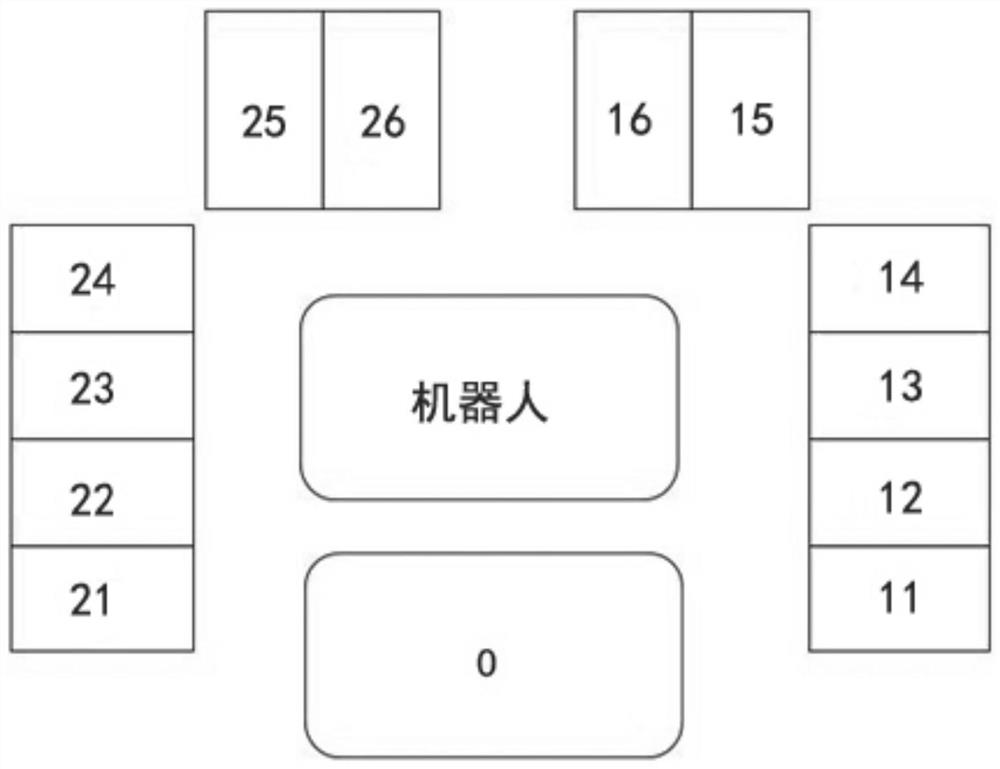
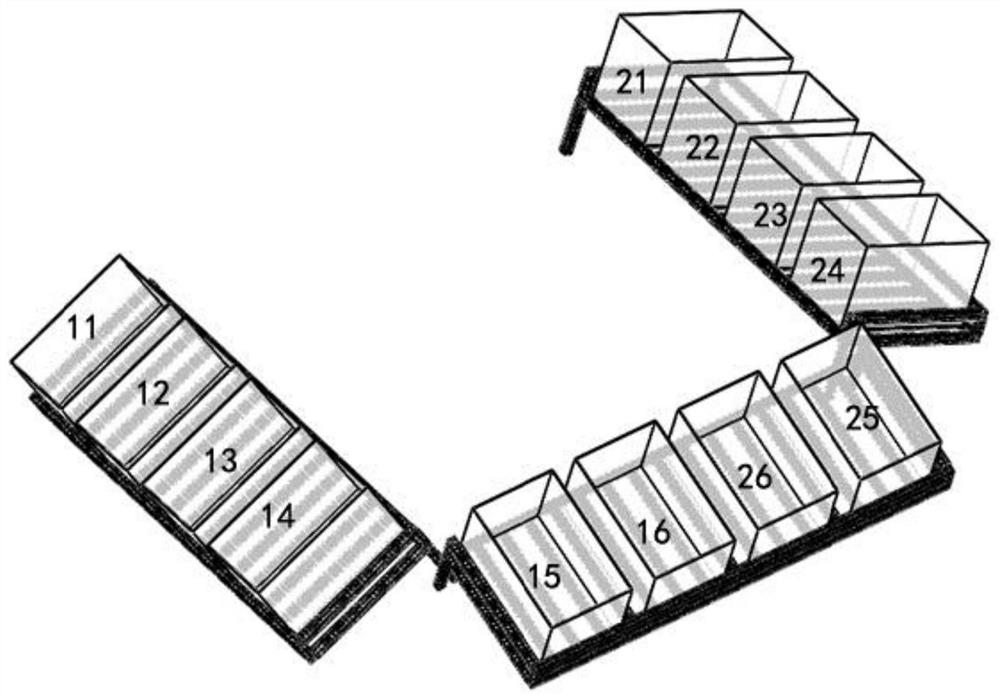
[0029] Such as Figure 1-2 The efficient sorting method of a kind of robot shown, comprises the following steps:
[0030] S1. Set the positions of several robotic arms of the robot to ensure that each of the operating points at the end of the robotic arm can reach a number of working stations. The stations include the pick-up point o and multiple placement points of the robotic arm; specifically Say, the fetch point o position is not limited to figure 1 The location of the robot only needs to be within the range allowed by the first robot arm and the second robot arm, and does not coincide with the location of the placement point.
[0031] Several groups of i placement points F corresponding to several robotic arms are arranged around the robot array. Exemplarily, the robotic arm includes a first robotic arm and a second robotic arm, and 6 placement points are arranged around each robotic arm in a manner such as figure 2 shown. The robotic arm includes an initial point f ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com