A Mobile Robot Navigation and Positioning System Based on Information Fusion
A mobile robot, navigation and positioning technology, applied in the field of robot navigation, can solve the problems of reduced accuracy, large amount of calculation, and reduced matching data, and achieve the effect of improving accuracy and reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
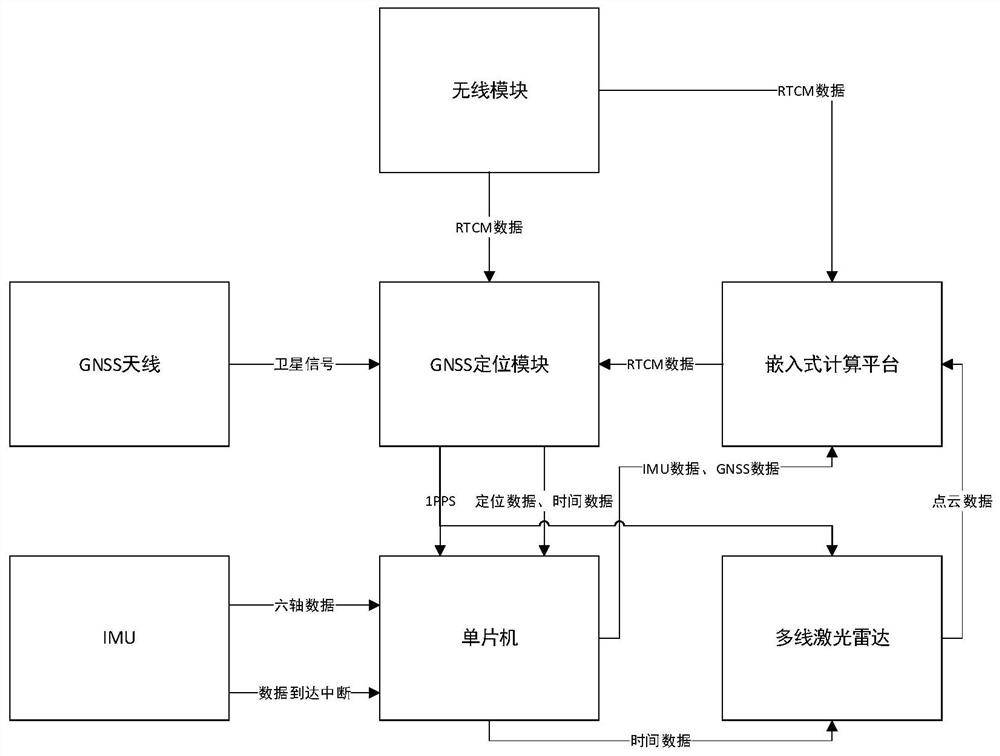
[0036] Such as figure 1 As shown, a mobile robot navigation and positioning system based on GNSS / INS / LIDAR-SLAM information fusion, its hardware consists of: GNSS antenna, GNSS positioning module, wireless module, embedded computing platform, IMU, multi-line laser radar, single-chip microcomputer .
[0037] The GNSS antenna is connected to the GNSS positioning module, and the GNSS antenna receives satellite navigation signals and transmits them to the GNSS positioning module.
[0038] The wireless module is selected from one of including but not limited to WIFI module, Bluetooth module, 4G module, and 2.4G data transmission module. The wireless module is connected to the GNSS positioning module and the embedded computing platform, and can receive differential message data (RTCM) wirelessly. And send to GNSS positioning module and embedded computing platform.
[0039] The GNSS positioning module receives satellite navigation signals through the GNSS antenna, receives RTCM dat...
Embodiment 2
[0079] We used the intelligent platform controller produced by Wuxi Kallman Navigation Technology Co., Ltd. to conduct experiments. The controller contains Nvidia's Jetson Nano embedded computing module (4-core A57, 4GB LPDDR4 memory), STM32F107 single-chip microcomputer, Openimu330B (IMU), Unicore 4B0 (GNSS module), EC20 (4G communication module), LS LIDAR C16 (16-line laser radar), etc. Jetson Nano runs the Linux operating system, obtains RTCM data through the 4G communication module, and sends the data to the GNSS module through the serial port. The STM32 obtains the IMU data through the SPI interface, obtains the GNSS module data through the serial port, adds the time scale and sends it to the Jetson Nano through the serial port, and sends the time data to the 16-line lidar through another serial port. Jetson Nano obtains IMU and GNSS data through the serial port of STM32, and obtains lidar data through the Ethernet interface. On the Linux system of Jetson Nano, ROS (Robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com