Asymptotic global matching binocular parallax acquisition method and system
A binocular disparity and acquisition method technology, applied in the field of computer perspective, can solve problems such as large computing resources and memory resources, finding the optimal matching disparity value, and local matching errors, so as to improve computing efficiency, reduce computing load, The effect of reduced calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
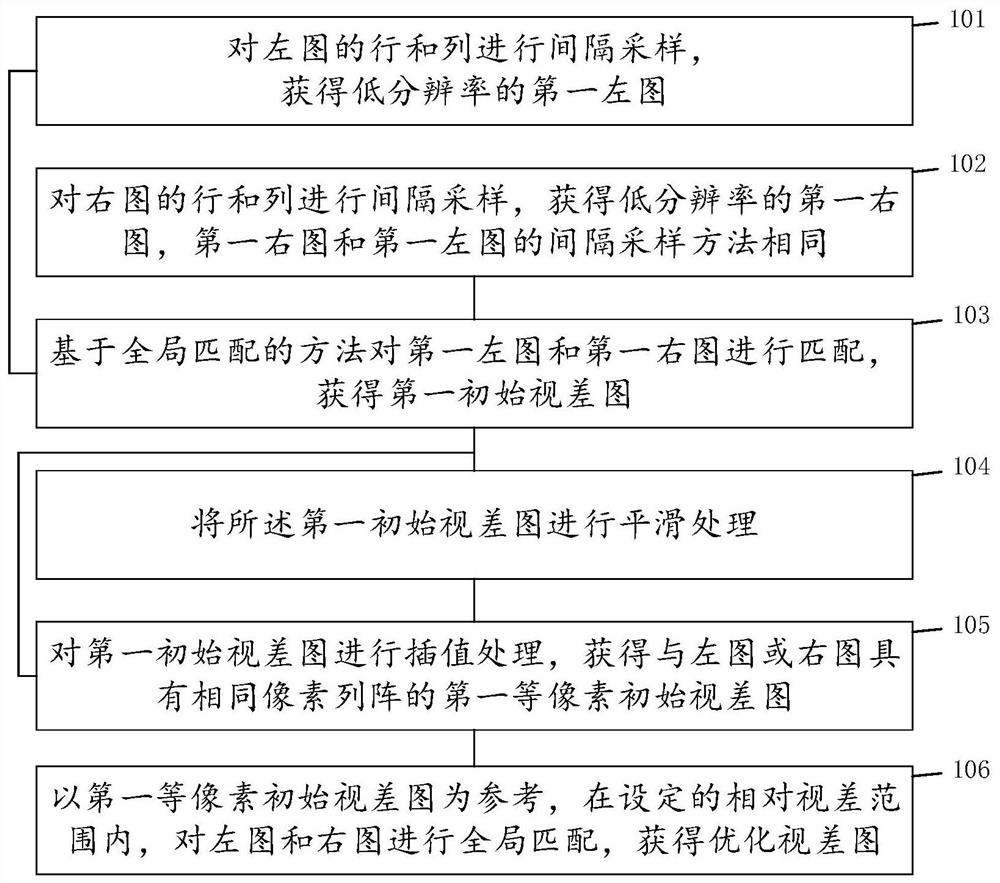
[0046] This embodiment provides a specific implementation method for optimizing parallax acquisition.
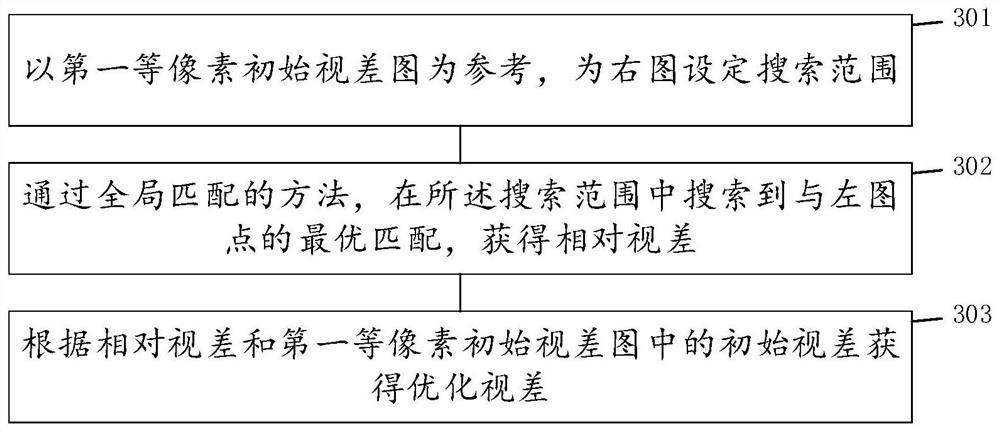
[0047] Such as image 3 As shown in step 105, the method for global matching of the left image and the right image includes:
[0048] Step 301: Set the search range for the right image with reference to the first pixel-level initial disparity map. For example, the search range may be a parallax range of ±10.
[0049] Step 302: By means of global matching, search for an optimal match with the point on the left image in the search range, and obtain the relative disparity. Specifically, the point in the left image is used as the target point, and the search range of the right image is determined through the first equal-pixel initial disparity map, and the optimal matching point is searched in the right image.
[0050] Step 303: Obtain the optimal disparity according to the relative disparity and the initial disparity in the first iso-pixel initial disparity map. The optimiz...
Embodiment 2
[0070] This embodiment provides a method for multi-level asymptotic matching processing.
[0071] Take the second-level asymptotic matching processing as an example, such as Figure 6 As shown, the method of obtaining binocular disparity through the second initial disparity:
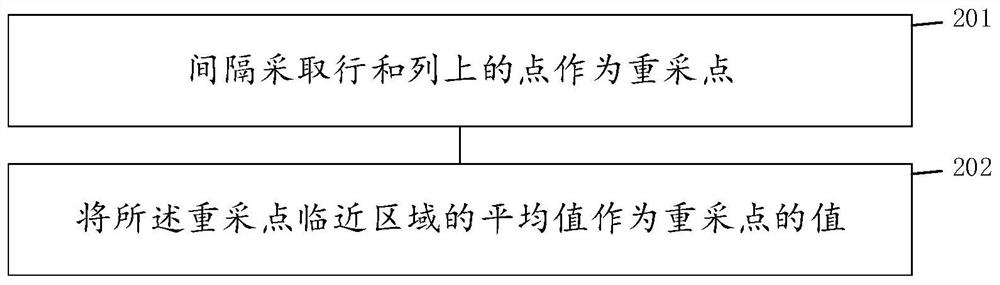
[0072] Step 601: Sampling the rows and columns of the left image at intervals to obtain a second left image with low resolution, and the resolution of the second left image is higher than that of the first left image.
[0073] Step 602: Sampling the rows and columns of the right image at intervals to obtain a second right image with low resolution, the resolution of the second right image is higher than that of the first right image.
[0074] Step 603: The first initial disparity map is interpolated to obtain a second equal-pixel initial disparity map having the same pixel array as the second left image or the second right image. The second equal-pixel initial disparity map may have the same pixel arra...
Embodiment 3
[0081] Such as Figure 7 As shown, this embodiment provides a method for preprocessing the left image or the right image:
[0082] Step 701: Align the left image and the right image in the Y direction.
[0083] Step 702: Crop the left image and the right image according to matching requirements.
[0084] When the binocular image is collected, although the position of the binocular camera is adjusted and centered, the taken pictures are aligned on the Y axis, and there is parallax in the X direction. Usually, there will be operational errors, so that the left image and the right image Not aligned on the Y axis. By clipping the information beyond the matching range, it can ensure the basic conditions of stereo matching and reduce the amount of computation.
[0085] In a specific embodiment, when calculating the BT cost, first calculate the parallax range of the right image, and then calculate the left image. The parallax range of the right image in the X direction must be gre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com