Optimal peer-to-peer collision avoidance method for unmanned vehicle
An unmanned vehicle and collision avoidance technology, applied in the field of collision avoidance, can solve problems such as gaps, dependence on network security and stability, single avoidance means, etc., and achieve the effect of collision avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
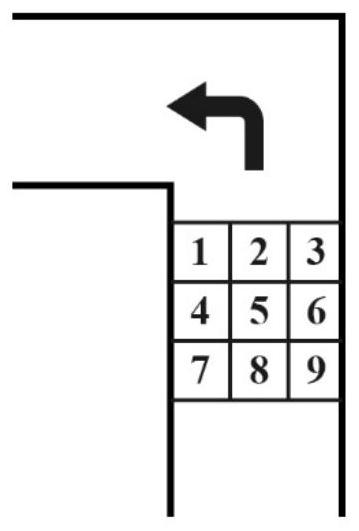
[0043] This embodiment considers that most of the roads can allow up to three vehicles to advance in parallel, image 3The position distribution map of up to three vehicles passing through the left 90° turn at the same time is given.
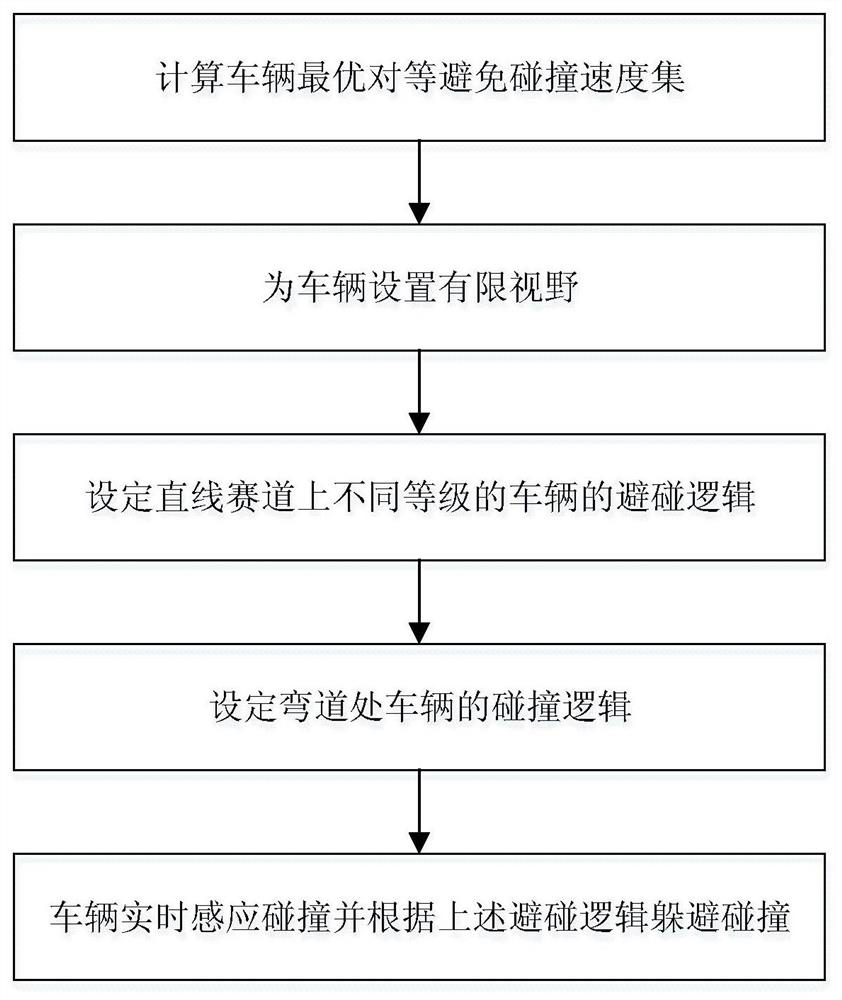
[0044] Such as figure 1 As shown, an optimal peer-to-peer collision avoidance method for unmanned vehicles in this embodiment includes the following steps:
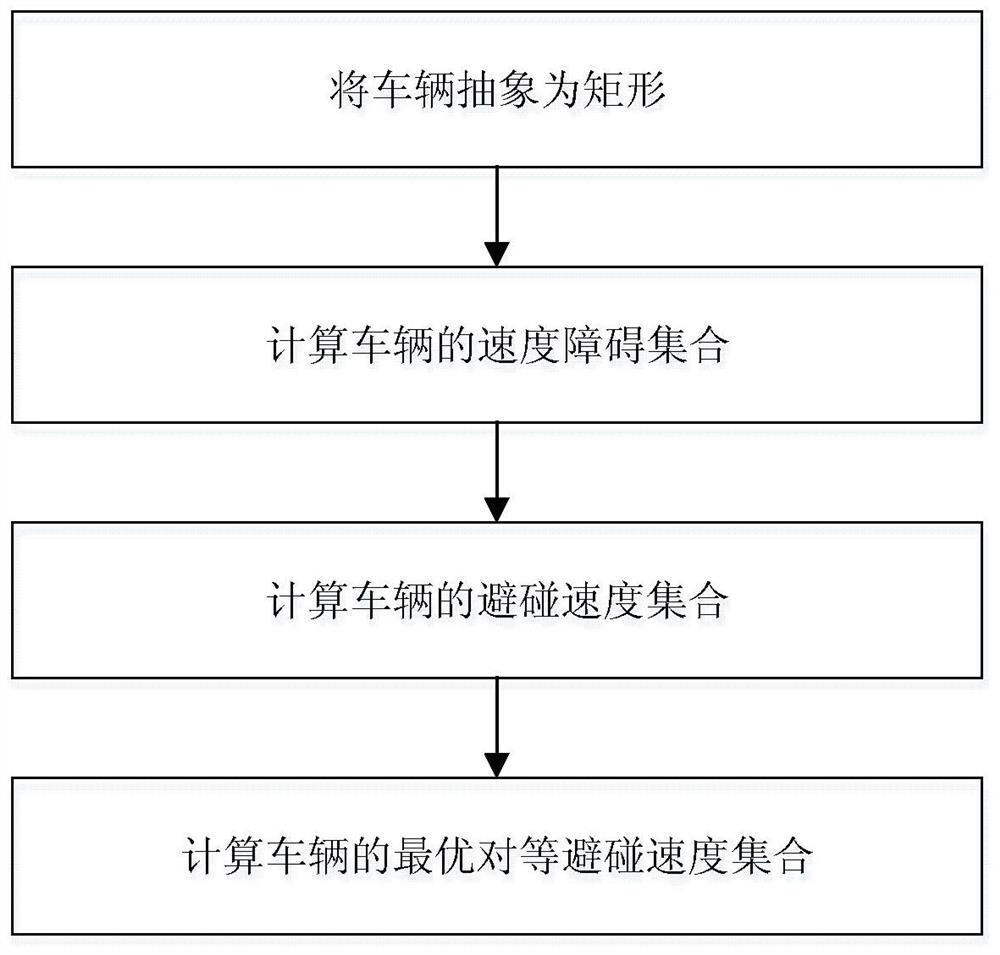
[0045] Step 1: The abstract processing of the vehicle grows into a rectangle with a width of b, with p as the center of the rectangle, and the vehicle is represented as R(p, a, b);
[0046] Step 2: Calculate the optimal peer-to-peer collision avoidance speed set between vehicles. The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com