Bionic quadruped robot
A quadruped robot and bionic technology, applied in the field of robotics, can solve the problems of reducing the authenticity, the number of degrees of freedom of the whole machine, and the simulation of dinosaurs with a stiff sense of motion, and achieve the effects of improving flexibility, simplifying structure, and high mobility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
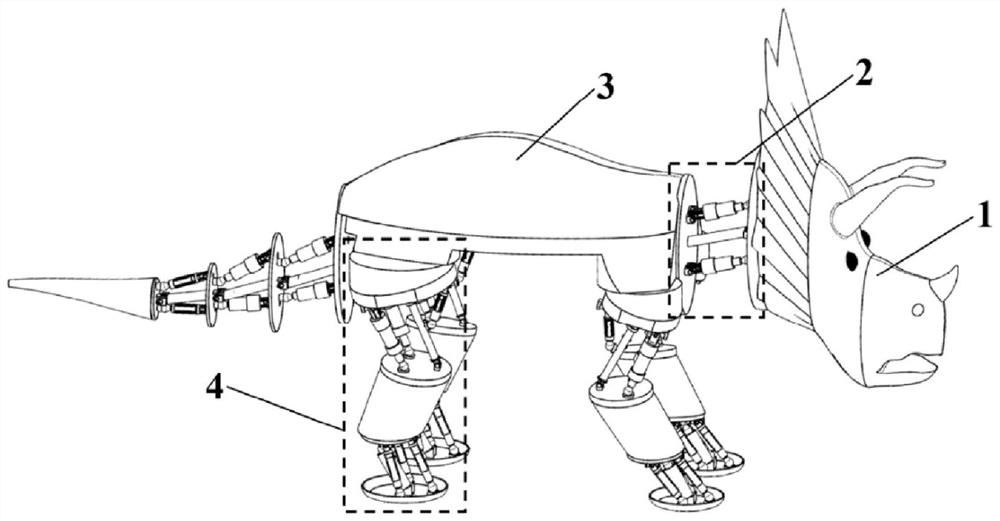
[0024] Such as figure 1 As shown, the present embodiment takes the Triceratops structure as an example, which specifically includes: a head 1, four head and tail structural units 2, four leg mechanisms 4 and a torso 3, wherein: the head 1 and the torso 3 pass through a head and tail structure The unit 2 is connected, the four leg mechanisms 4 are connected with the trunk 3 respectively, and the three head and tail structural units 2 connected in sequence by the connecting piece 25 form a tail and are connected with the trunk 3 .
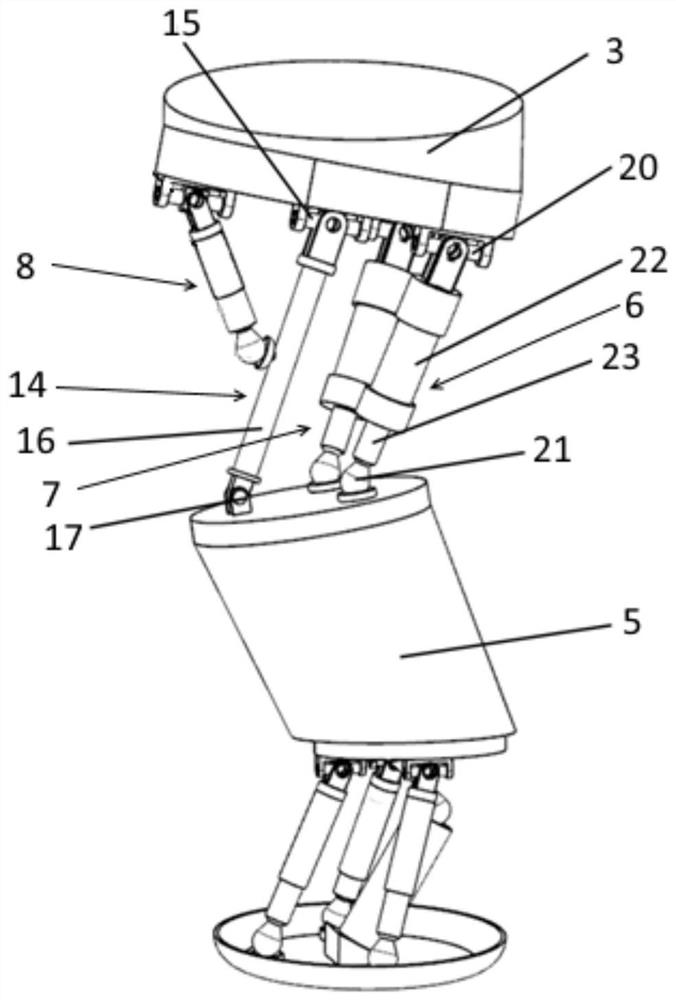
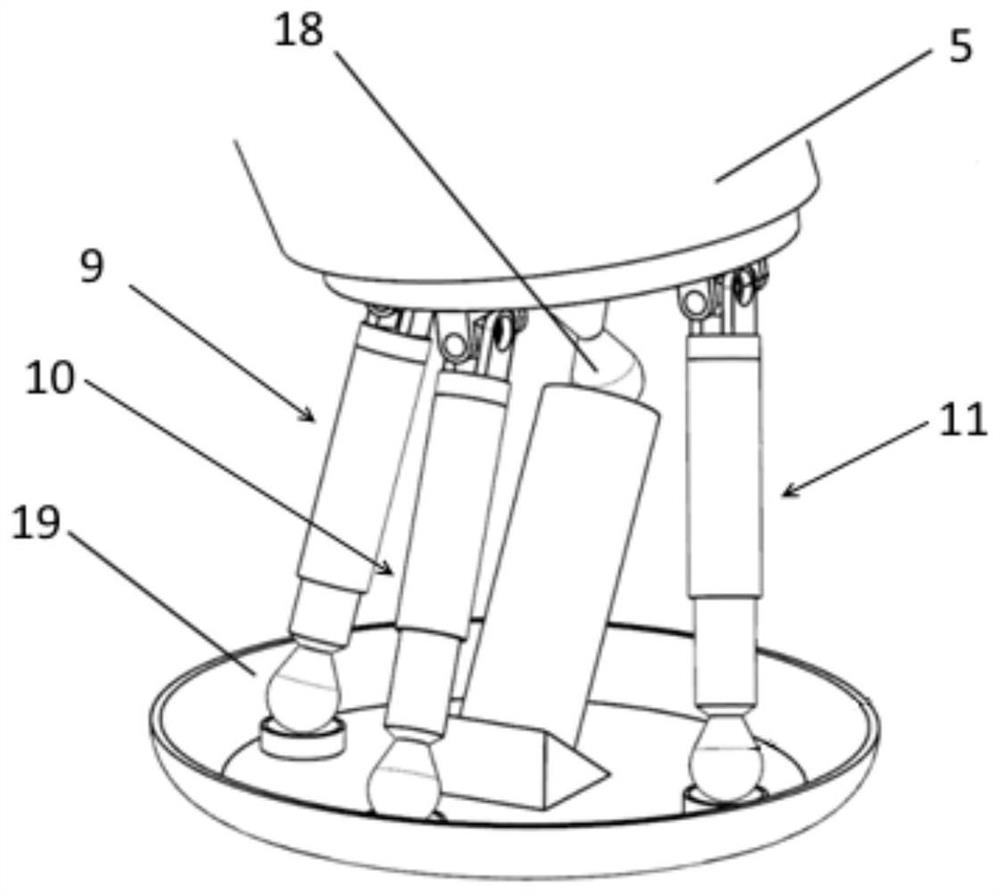
[0025] Such as figure 2 As shown, the leg mechanism 4 includes: a thigh parallel mechanism and an ankle joint parallel mechanism connected by a connecting piece 5, wherein: the thigh parallel mechanism uses the trunk 3 as a static platform, the connecting piece 5 as a dynamic platform, and the ankle joint The parallel mechanism uses the connector 5 as a static platform.
[0026] The thigh parallel mechanism includes: the first driving branch chain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com