A robot path planning and scheduling method
A technology of path planning and scheduling method, applied in the field of robots, can solve the problems of slow walking of robots, affecting the efficiency of robot operations, and increasing task time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
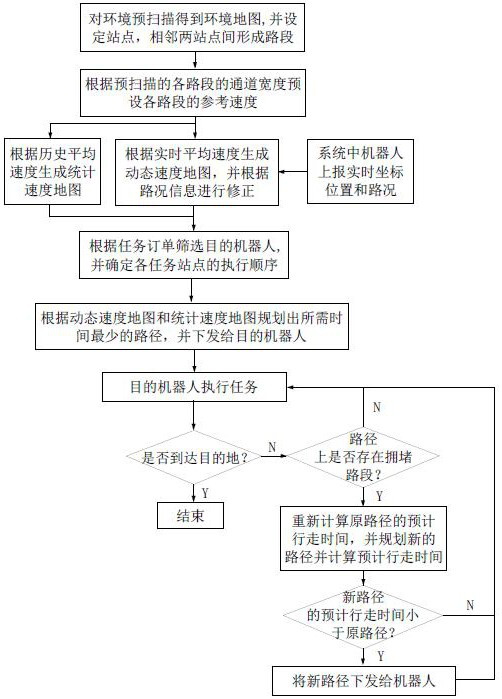
[0041] A robot path planning and scheduling method, such as figure 1 , including the following steps:
[0042] 1. Setting of road section and reference speed
[0043] Pre-scan the environment with the laser radar of the robot to obtain the environmental map and establish a coordinate system, set the site in the map according to the business type, form a road section between two adjacent sites, and connect all the road sections between the two sites in turn to form a path between the two sites; And the reference speed of each road section is preset according to the channel width of each road section pre-scanned. A station is a business-related location point, or a complex route is divided into several simplified road sections according to road conditions. According to the plan, there may be multiple paths composed of different road sections between two stations.
[0044] The reference speed of each road section is set according to the passage width of each section. When the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com