Weld joint identification and path extraction method for wall-climbing robot navigation
A wall-climbing robot, robot technology, applied in character and pattern recognition, instruments, computer parts, etc., can solve the problem of difficulty in accurate identification and tracking of welding seams, achieve work efficiency, improve precision and accuracy, and save costs and time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention. It should be noted that the words "front", "rear", "left", "right", "upper" and "lower" used in the following description refer to the directions in the drawings, and the words "inner" and "outer ” refer to directions towards or away from the geometric center of a particular part, respectively.
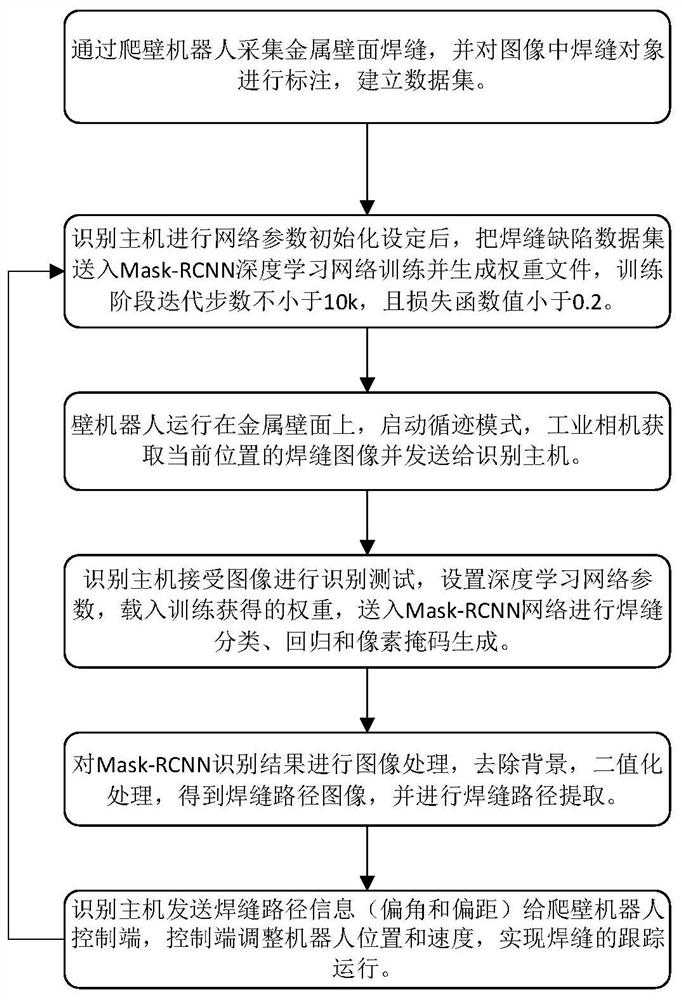
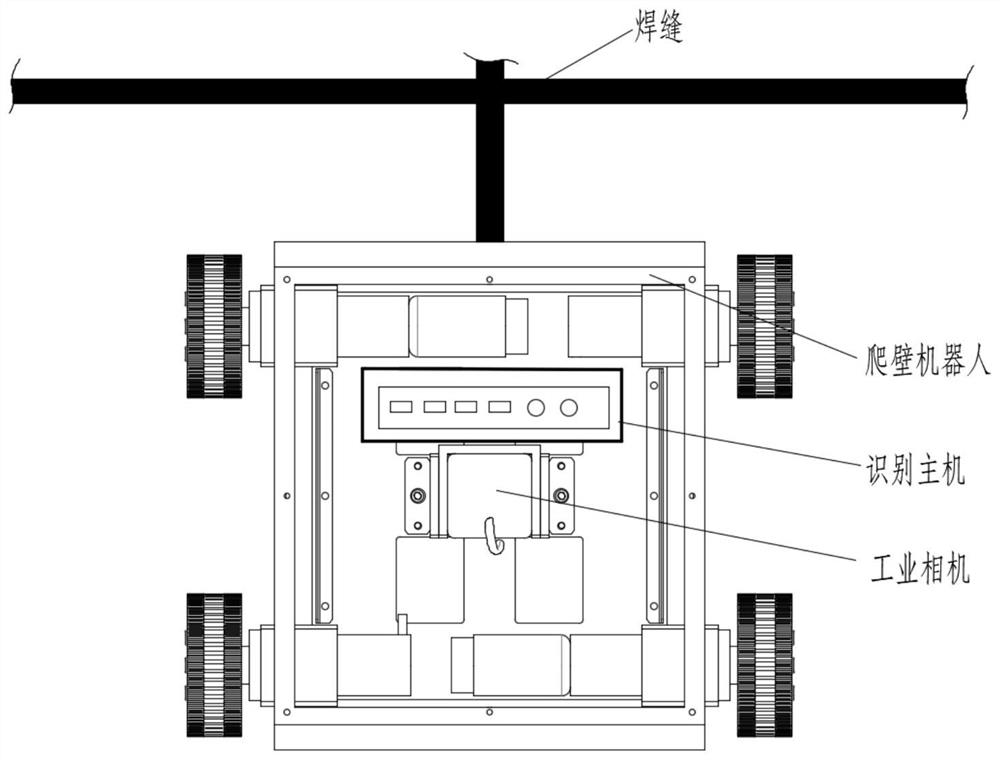
[0036] like figure 1 , 2 As shown, this embodiment provides a method for weld seam identification and path extraction for wall-climbing robot navigation. The method is implemented by the following device, which includes an industrial camera, a recognition host, and a wall-climbing robot. The recognition camera is installed and climbed The center position of the wall robot cha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com