Finger joint rehabilitation training evaluation method and system
A technology of rehabilitation training and training methods, which is applied in the direction of muscle training equipment, sports accessories, and testing muscle strength, which can solve the problems of high secondary injury rate, low safety, and inability to achieve uniformity of wearable equipment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
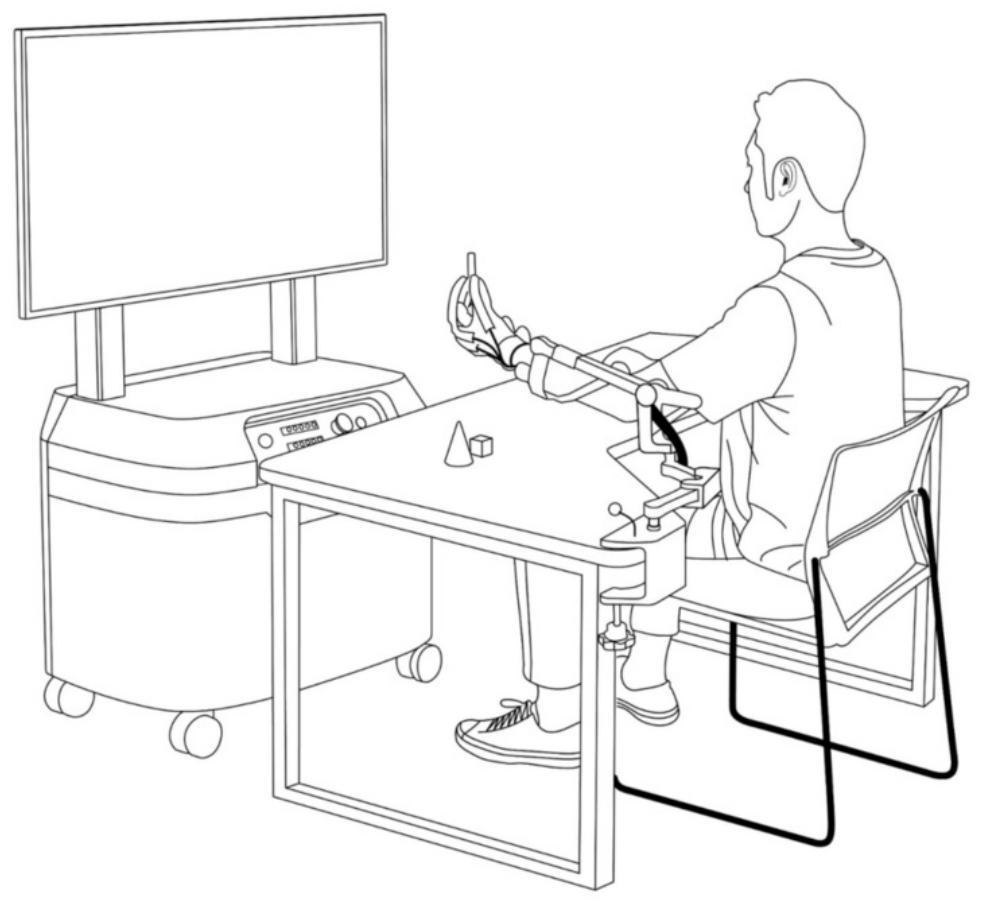
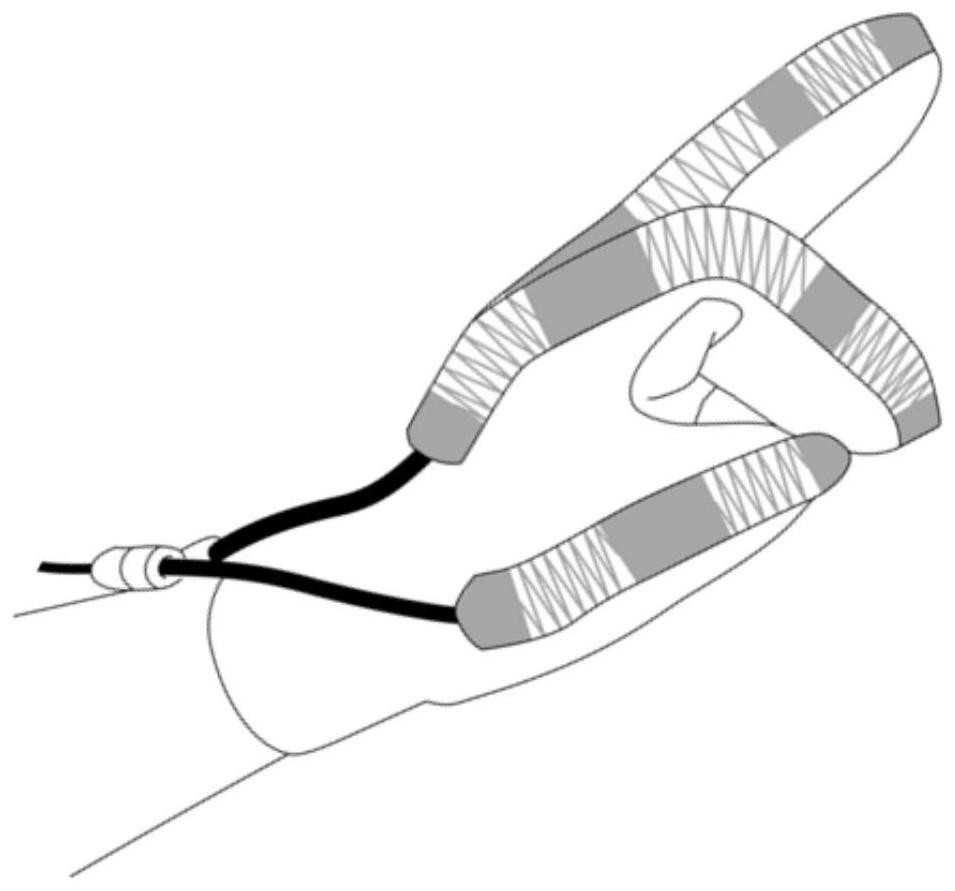
[0069] The present invention designs an evaluation method for finger joint rehabilitation training, based on soft gloves with pneumatic structures at the positions of each finger joint, such as figure 1 As shown, in order to achieve rehabilitation training for the affected hand of the hemiplegic patient, a mirror image training method, an active training method, a power-assisted training method, a finger range of motion evaluation method, a grip strength evaluation method, and a pinch strength evaluation method were designed. Among them, the mirror image training method Wear a soft glove on the affected hand of the hemiplegic patient, such as Figure 5 As shown, perform the following steps A1 to A6.
[0070] Step A1. Judging whether a stop instruction about the mirror image training method is received, if yes, jump out ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com