A Layered Point Cloud Segmentation Method Based on dbscan
A technology of layering point and point cloud data, applied in image analysis, image enhancement, instrument and other directions, can solve the problems of DBSCAN under-segmentation, over-segmentation, missing point cloud data, etc., and achieve the effect of improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
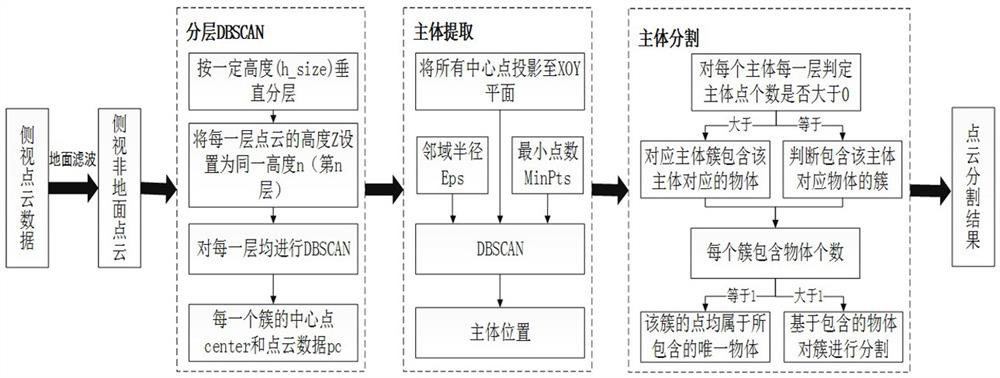
[0056] Below in conjunction with the accompanying drawings, the technical solutions of the present invention are described in detail.
[0062] Step S4: traverse all clusters, if the cluster contains only one object, it is considered that all points in the cluster belong to the object
[0063] The following is to specifically describe the technical solution of the present invention.
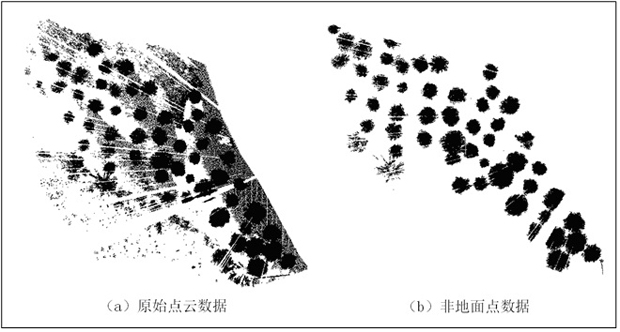
[0068] After the ground point and the non-ground point are divided, the objects on the ground are no longer connected by the ground point, and we can
[0070] Where L is the layer number of point p, z is the Z value of point p, z_min is the minimum value of point cloud Z value, and H is the height of each layer.
[0074]
[0075]
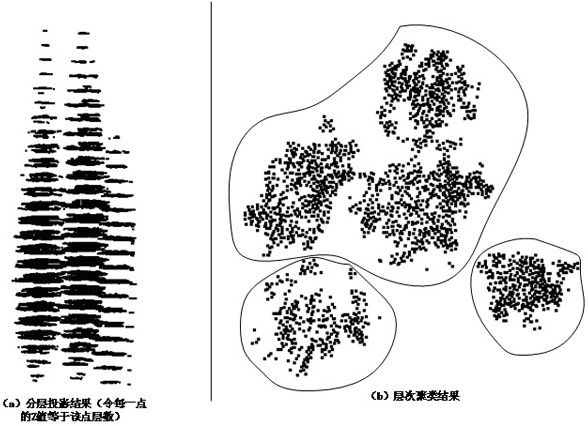
[0078] The obtained center point of each cluster represents the position of each cluster, based on the consistency of the main body plane position distribution,
[0084] Traverse all clusters, if the cluster contains only one object, it is considered that all points in the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com