An amphibious bionic robot
A bionic robot, amphibious technology, applied in amphibious vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of low walking efficiency, complex structure, unsatisfactory stability and walking speed, etc., to achieve high motion stability and environmental protection. good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
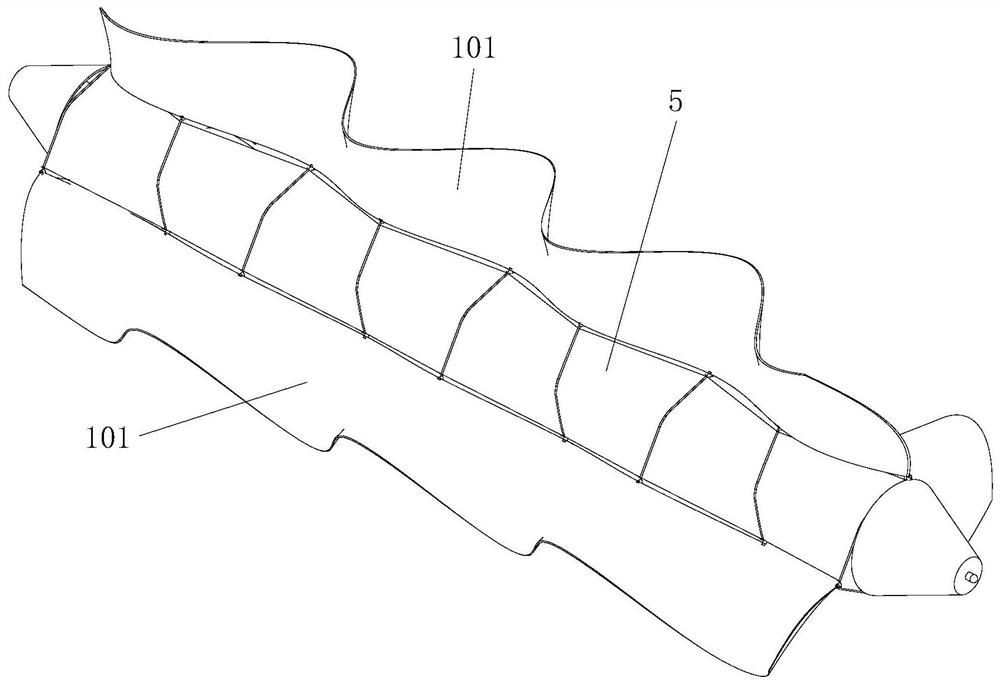
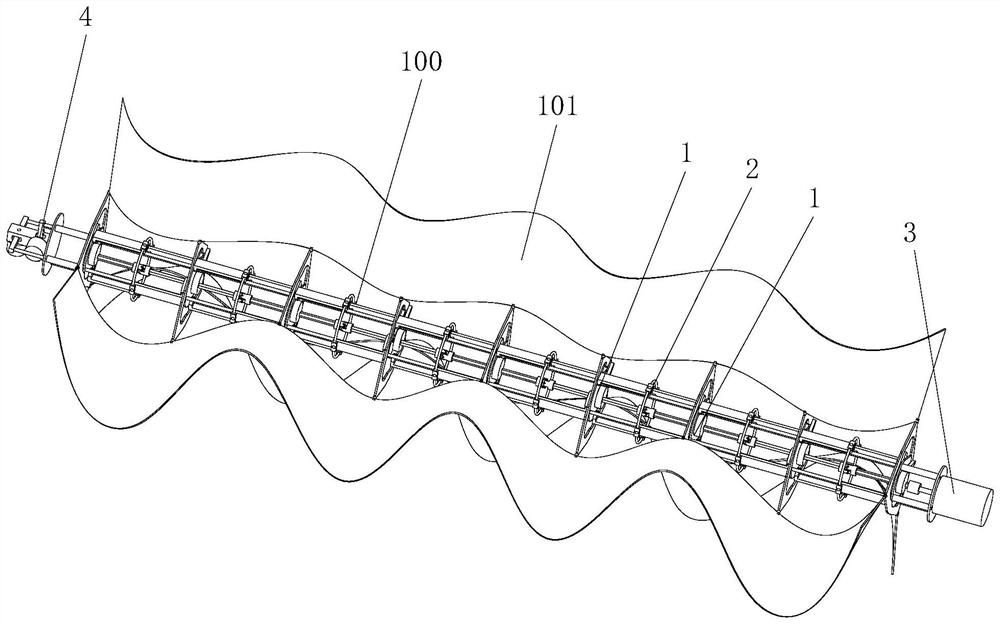
[0030] like Figure 1 to Figure 5 As shown, the amphibious bionic robot of this embodiment includes a plurality of wave fins 101 and a plurality of swing modules 1 that are sequentially connected to form a bar-shaped body 100, and two adjacent swing modules 1 are connected by a universal connection mechanism 2, Each swing module 1 includes a base plate 11, a swing member 12 mounted on the base plate 11 in a swinging manner, and a swing assembly mounted on the base plate 11 for driving the swing member 12 to swing back and forth. The amphibious bionic robot also includes a swing assembly for driving each swing assembly. The working oscillating driving device 3 and the steering driving device 4 for driving the bar-shaped body 100 to bend and turn, a plurality of undulating fins 101 are arranged at intervals around the bar-shaped body 100 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com