Flexible mechanical arm control device and method based on reciprocating vibration chain body elastic base
A flexible manipulator and control device technology, applied in mechanical oscillation control, non-electric variable control, measurement device, etc., can solve problems such as influence on spacecraft stability, low natural frequency of space manipulator, excitation by low-frequency vibration modal interference, etc. problems, to achieve the effect of quickly suppressing large-value vibration, quickly suppressing small-amplitude residual vibration, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
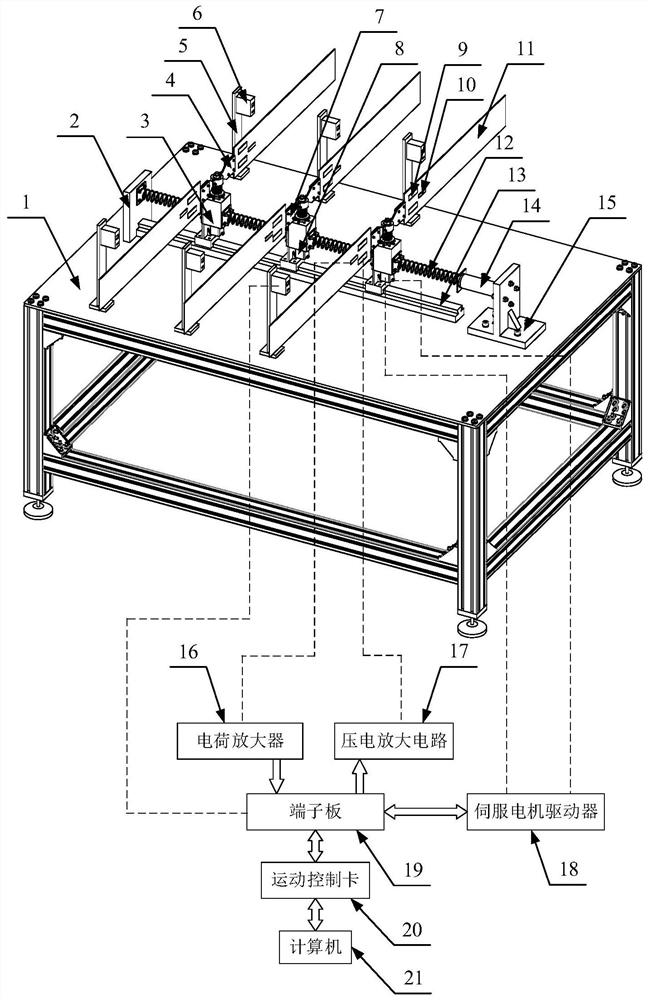
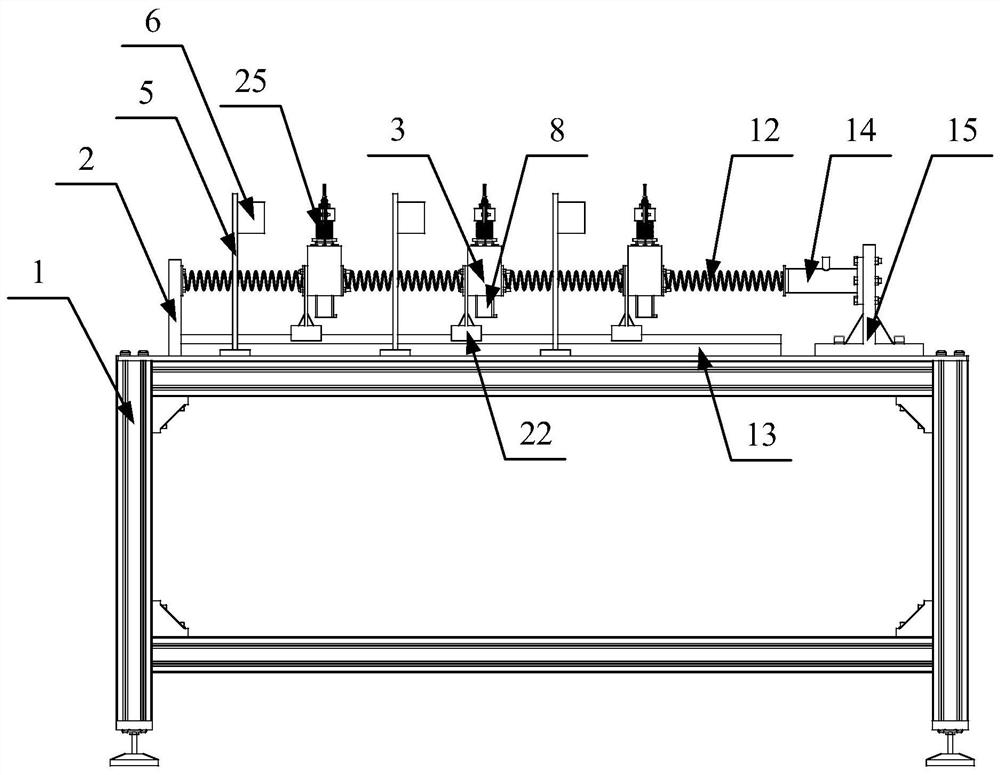
[0041] like Figure 1-Figure 5 As shown, a flexible manipulator control device based on the elastic base of the reciprocating vibration chain body, including a flexible arm body part, a vibration detection part and a vibration control part;
[0042] ——The flexible arm body part includes three flexible monomers with the same structure, and the three flexible monomers with the same structure are sequentially connected by two springs 12, and the baffle is connected with the flexible monomer at the tail end through the spring, and the piston The type vibrator is connected to the flexible monomer at the head end by a spring, the base 15, the linear guide rail 13 and the baffle plate 2 are installed on the test bench 1, and the piston type vibrator 14 is connected to the base 15 through the installation hole at the bottom. Thereby ensuring that the vibration excitation generated by it is concentrated on the output end of the piston, so that the elastic base generates reciprocating v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com