Parafoil system obstacle avoidance track planning method and system
A technology for track planning and parafoil, which is applied in general control systems, control/adjustment systems, three-dimensional position/channel control and other directions to achieve the effects of simplified control, low track energy consumption, and large control amount redundancy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0117] In this embodiment, the trajectory planning of the parafoil system is carried out under the barrier-free condition, and the objective function is:
[0118] J=f 1 J 1 +f 2 J 2 +f 3 J 3
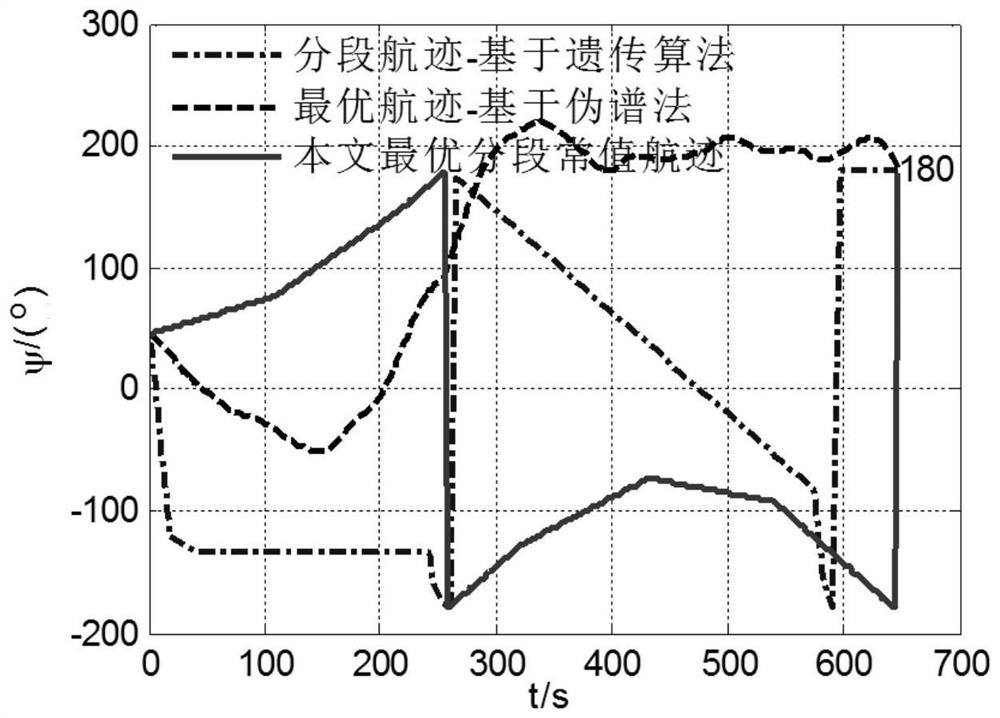
[0119] That is, the safety obstacle avoidance index J is not considered 4 , and compared with the optimal control homing algorithm based on Gaussian pseudospectral method and the segmented homing algorithm based on genetic algorithm. Among them, the optimal track algorithm based on pseudospectrum refers to the literature: (1) Gao Haitao, Zhang Limin, Sun Qinglin, et al. Fault-tolerant design of homing trajectory of parafoil system based on pseudospectral method [J]. Control Theory and Application. 2013(06) : 702-708; (2) Luo Shuzhen, Sun Qinglin, Tan Panlong, et al. Complex multi-constraint trajectory planning of parafoil system based on Gaussian pseudospectral method [J]. Journal of Aeronautics and Astronautics. 2017(03): 220-230. The segmented track algorithm based on genetic a...
Embodiment 2
[0122] In this embodiment, the obstacle avoidance track planning of the parafoil system is carried out in the presence of obstacles, and the objective function is:
[0123] J=f 1 J 1 +f 2 J 2 +f 3 J 3 +f 4 J 4
[0124] In this embodiment, there are 3 peaks in the parafoil flight area, the center coordinates are (2000, 1000), (1000, 3000), (400, 1500), and the heights of the peaks are 2500, 2000, and 1800, respectively. x si 550, 480, 380 respectively, the preset safety distance R safe is 50 meters, and the rest of the airdrop conditions are exactly the same as the barrier-free situation in Example 1. Considering that the segmented homing method has no obstacle avoidance ability, but the pseudospectral method has the obstacle avoidance planning ability, this embodiment is not suitable for the optimal obstacle avoidance based on the pseudospectral method and the optimal segmented constant value obstacle avoidance method disclosed in the present invention. The effect o...
Embodiment 3
[0131] This embodiment discloses a system for implementing the obstacle avoidance track planning method for the parafoil system in the second embodiment, as shown in FIG. 11 , including:
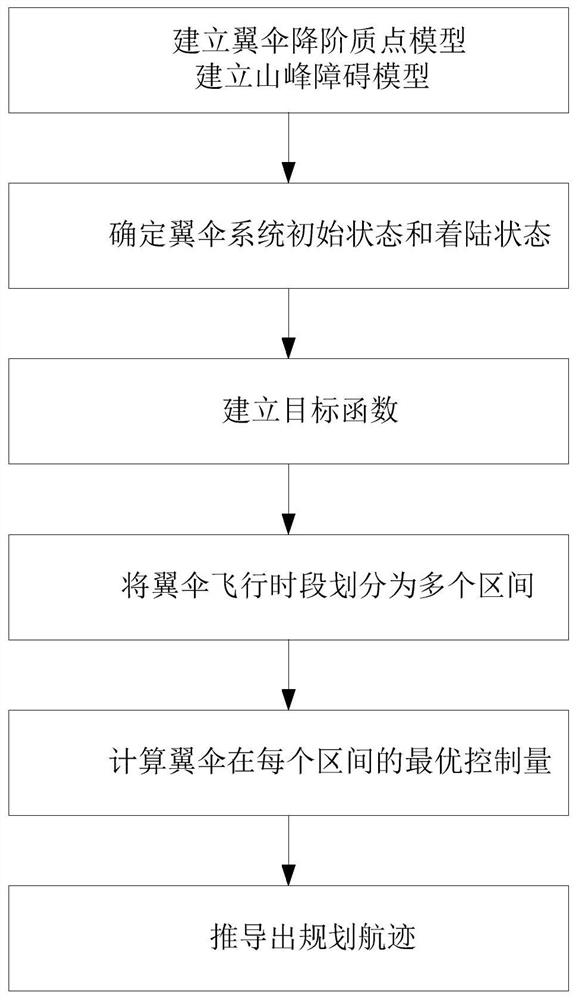
[0132] Parachute drop-down particle model building module 1 is used to establish the parachute drop-order particle model in the wind-fixed coordinate system:
[0133]
[0134] where (x, y, h) are the position components of the parafoil system in the x, y, and vertical directions of the horizontal plane in the wind-fixed coordinate system, respectively, v s is the horizontal speed of the parafoil system, v z is the vertical velocity, ψ is the heading angle, is the heading angular rate, and u is the control quantity corresponding to the asymmetric down-bias of the parafoil;
[0135] The mountain obstacle model building module 2 is used to establish the mountain obstacle model in the parafoil flight area:
[0136]
[0137] Where h(x, y) is the height of the mountain obstacle at the ho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com