Safety boundary and force control method for surgical robot
A surgical robot and safety boundary technology, applied in the field of safety boundary and force control of surgical robots, can solve the problems of medical accidents, inability to guarantee the operation effect, and high cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
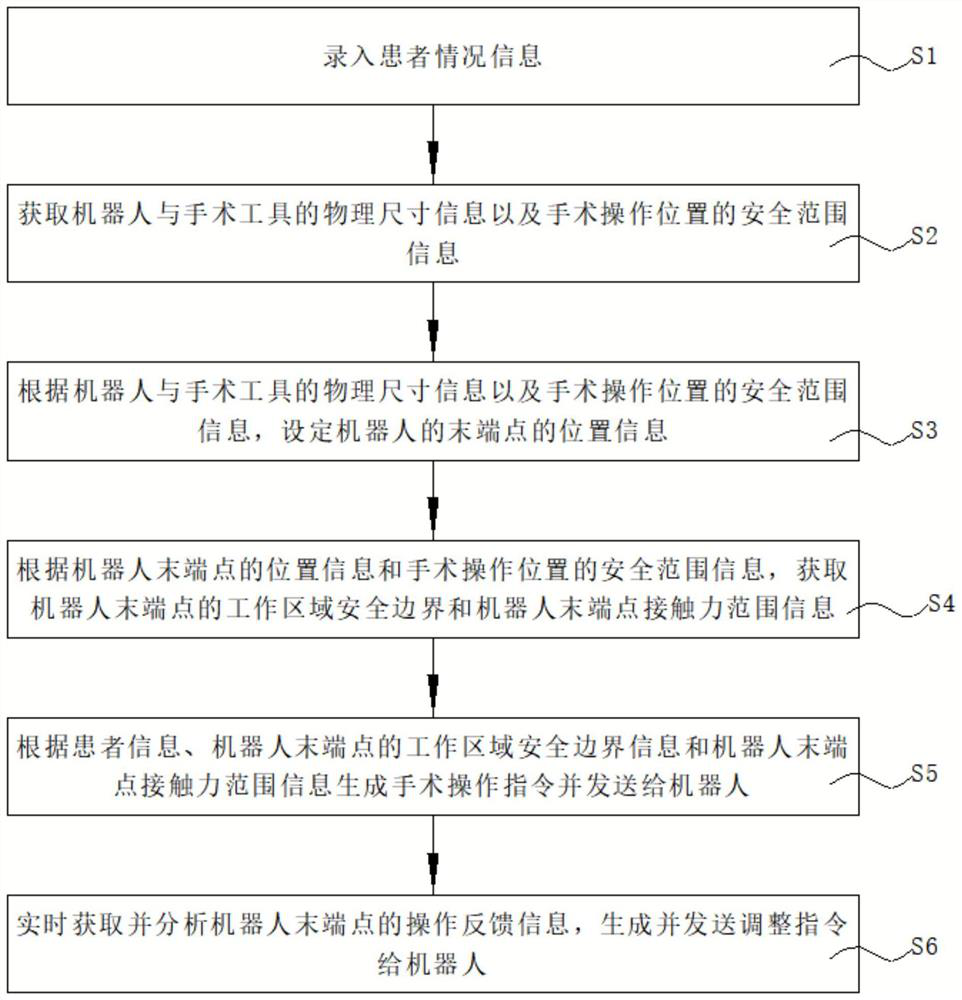
[0057] Such as figure 1 As shown, this embodiment provides a safety boundary and force control method for a surgical robot, including the following steps:
[0058] S1. Enter patient information;
[0059] S2. Obtain the physical size information of the robot and the surgical tool and the safety range information of the surgical operation position;
[0060] S3. Set the position information of the end point of the robot according to the physical size information of the robot and the surgical tool and the safety range information of the surgical operation position;
[0061] S4. According to the position information of the end point of the robot and the safety range information of the surgical operation position, obtain the safety boundary of the working area of the end point of the robot and the contact force range information of the end point of the robot;
[0062] S5. According to the patient information, the safety boundary information of the working area of the end point...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com