Hoist controller generation method, control method and controller generation system for bridge crane
A bridge crane and winch system technology, applied in the direction of load hanging components, cranes, transportation and packaging, etc., can solve the problem of high control effect, limited application range of estimation methods, wide application of control schemes, and inability to guarantee the trajectory of observed variables, etc. problems, to achieve the effect of realizing tracking control, improving motion efficiency, and improving transportation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
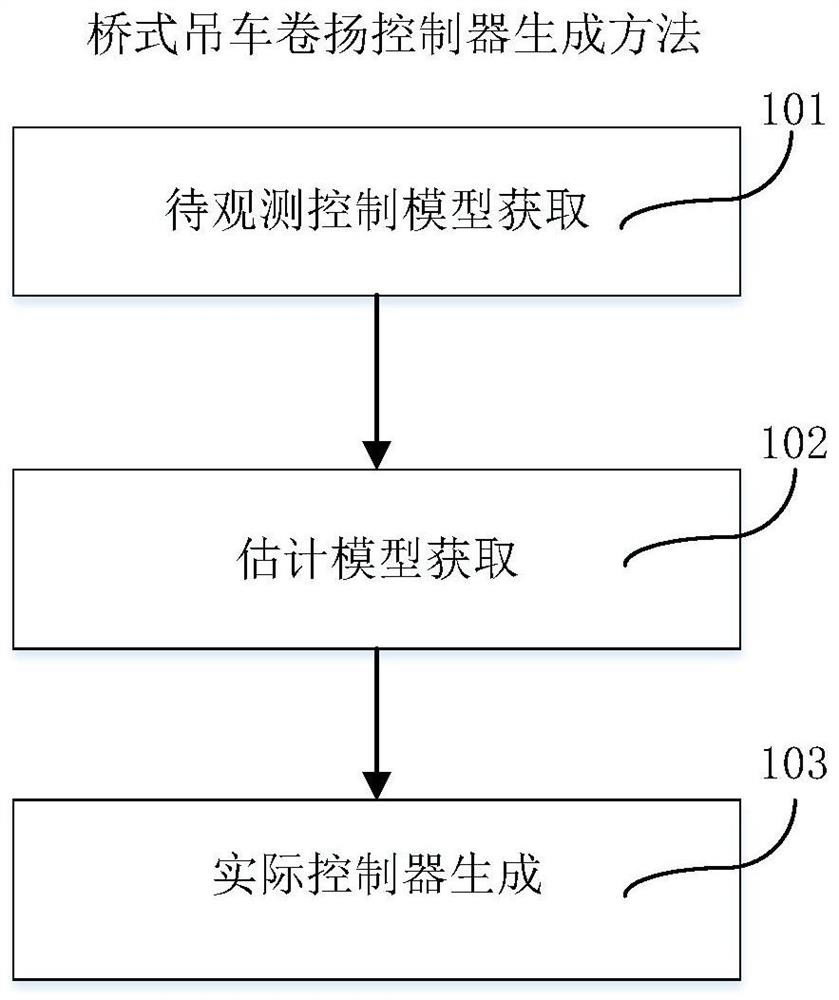
[0105] As an implementation of estimation model acquisition, specific methods include:
[0106] performing system extension on the control model to be observed to obtain a system extension matrix; defining a system observer based on the system extension matrix;
[0107] Define a full-state virtual controller according to the system observer, based on the defined performance index J v Obtaining the quadratic optimal feedback rate k, combining the quadratic optimal feedback rate k and the virtual controller to obtain an optimal feedback full state observer; and,
[0108] Based on the optimal feedback full state observer, an estimation model containing f(t) and suitable for control design is obtained
[0109] Among them, the specific method of system expansion is uncertain, and the obtained system expansion matrix is the theoretical equivalent representation of the control model to be observed, which can be used as a structural reference and error proof for the system observ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com