


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
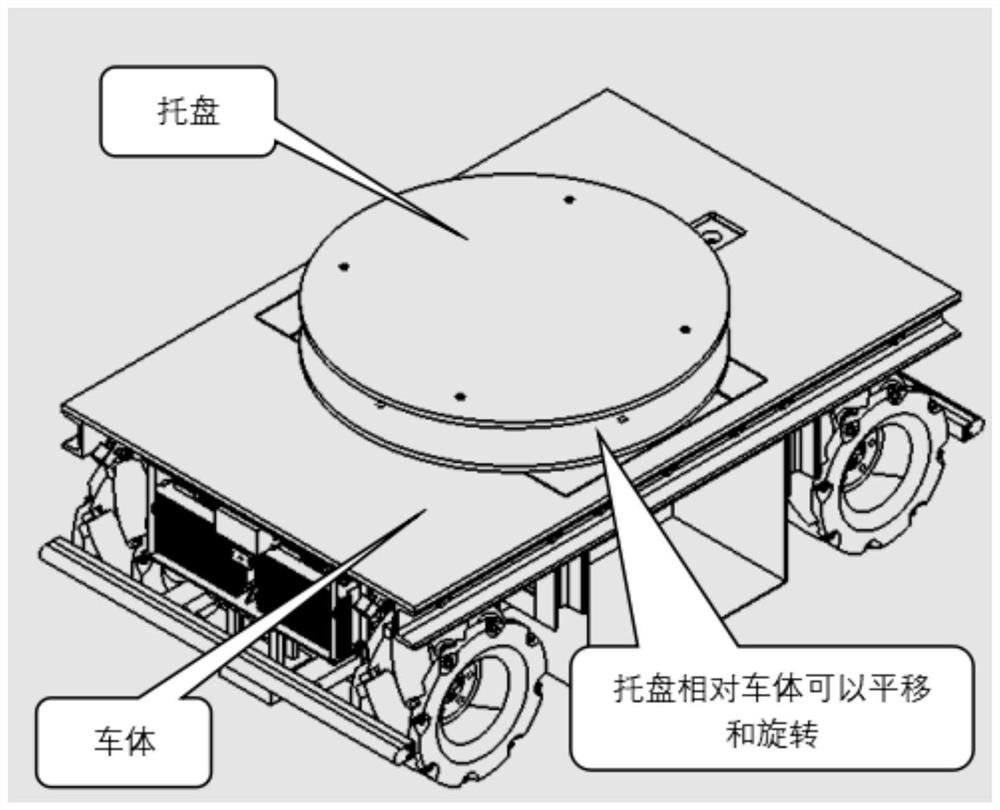
Multi-vehicle cooperative carrying rapid queue changing method based on omnidirectional mobile AGV
A technology of omnidirectional movement and rapid transformation, applied in the direction of motor vehicles, non-electric variable control, transportation and packaging, etc., can solve the problems of low scalability, poor navigation, and poor flexibility of AGV
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solution of this patent will be further described in detail below in conjunction with specific embodiments.
[0035] In the description of this patent, it should be noted that, unless otherwise clearly specified and limited, the terms "installation", "connection", "connection", and "setting" should be understood in a broad sense, for example, it can be fixed connection, setting , can also be detachably connected and set, or integrally connected and set. Those of ordinary skill in the art can understand the specific meanings of the above terms in this patent according to specific situations.
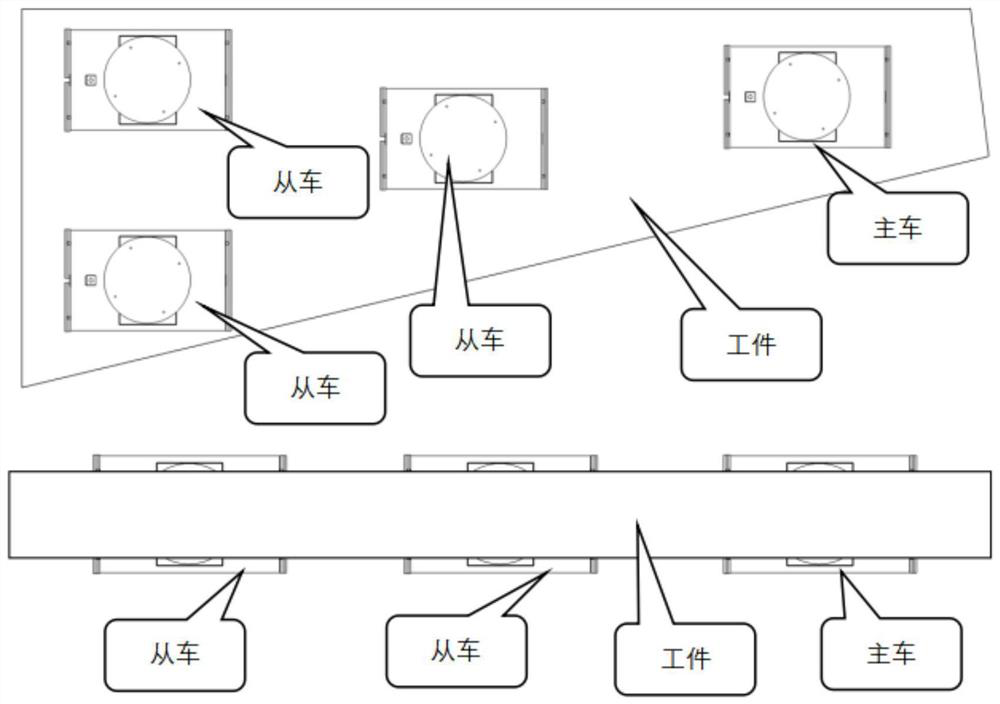
[0036] A multi-vehicle cooperative handling fast change queue method based on omnidirectional mobile AGV, comprising the following steps:
[0037] S1: Determine various data to ensure that the initial relative positions of the master car and each slave car are accurate;
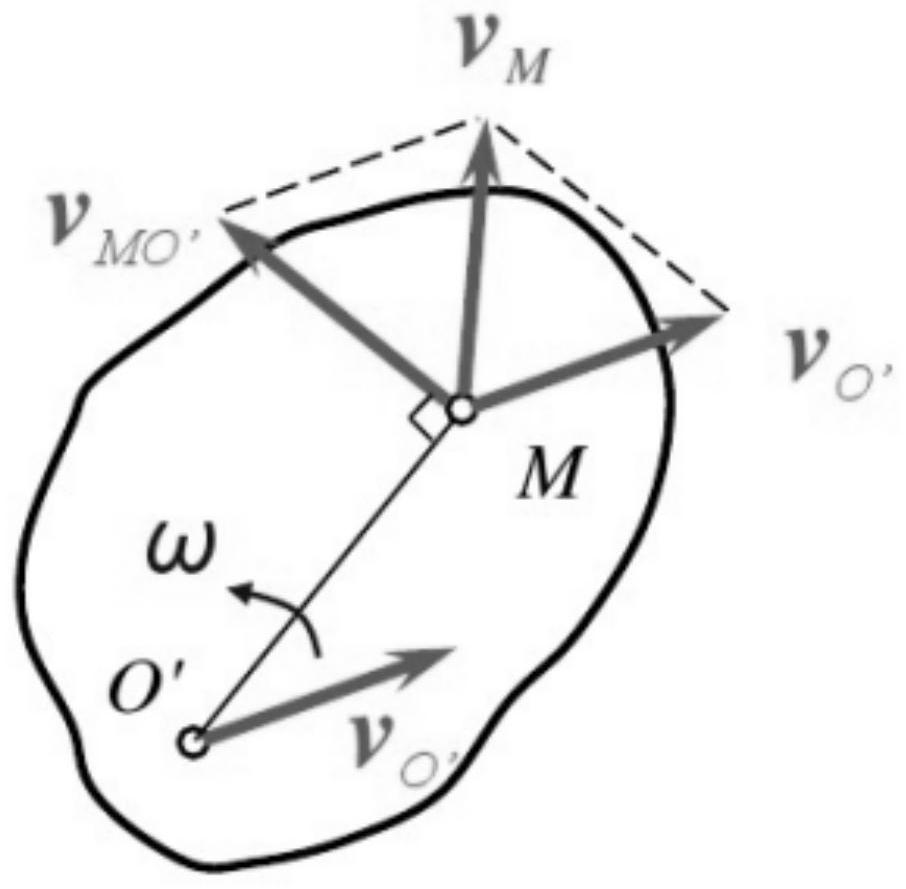
[0038] S2: When the starting position is accurate, the master vehicle obtains its own motion ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com