Walking robot
A walking robot, robot technology, applied in motor vehicles, transportation and packaging, etc., can solve problems such as rigid walking machines
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
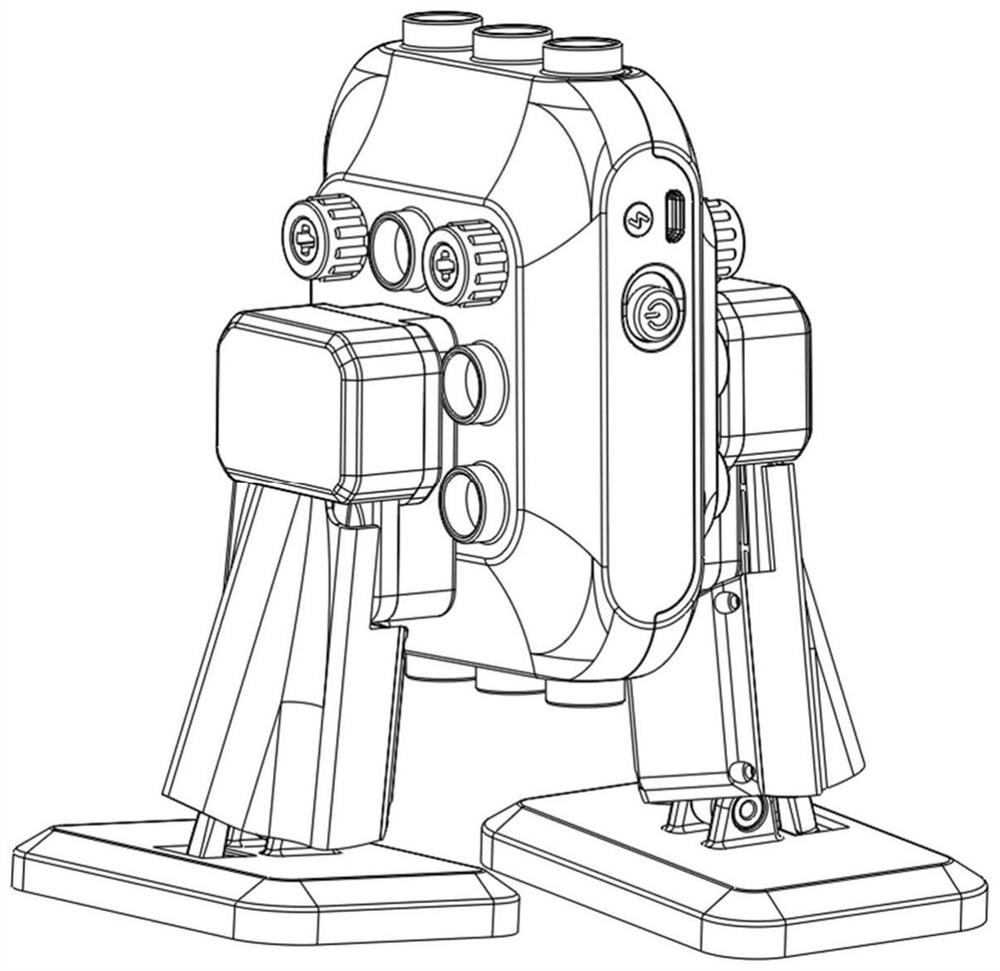
[0094] Figure 1-17 It is a schematic diagram of the walking robot provided by the present invention.
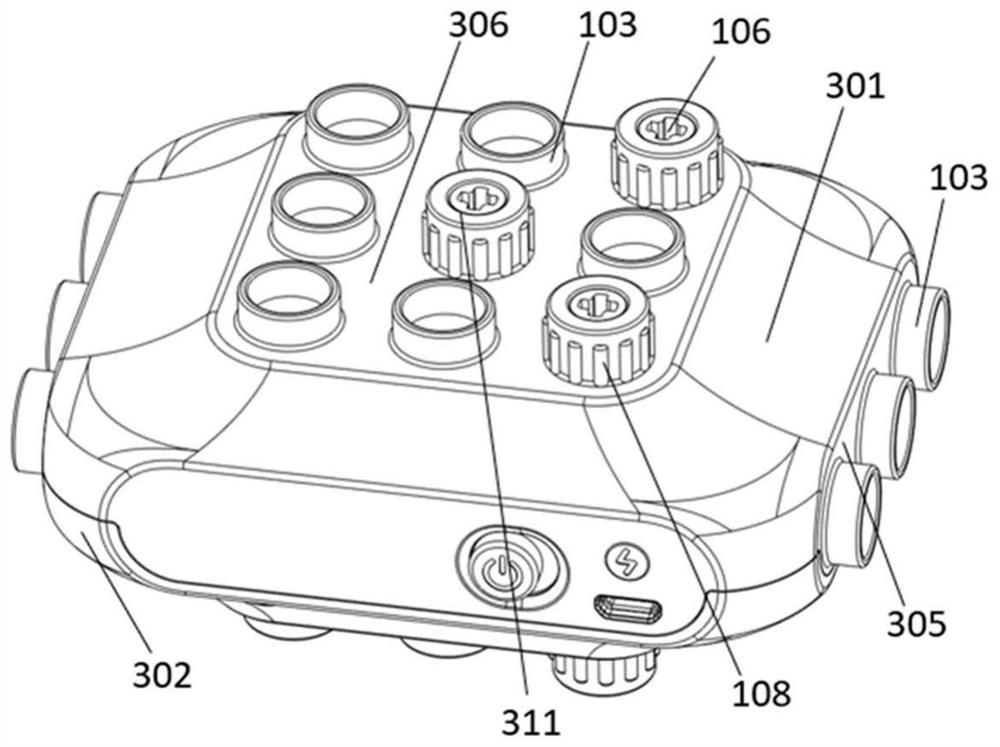
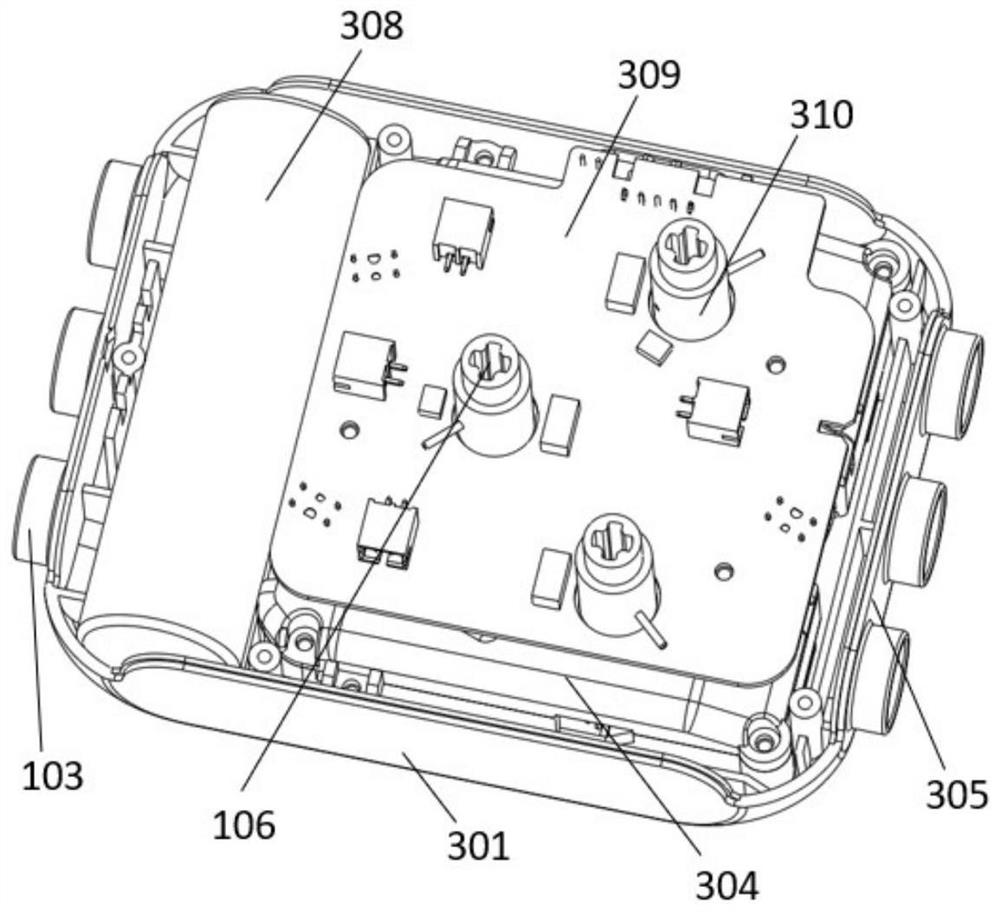
[0095] The main control building block includes a main control housing, a motor 307, a battery 308, a control board 309, an output shaft 310, a gear set, an assembly housing, and a splicing assembly; the main control housing includes a first main control housing 301 and a second main control housing. The casing 302 ; the assembly casing includes a first assembly casing part 303 and a second assembly casing part 304 ; the splicing assembly includes a first splicing part 305 and a second splicing part 306 .
[0096] The first main control housing 301 forms the top of the main control building block, the second main control housing 302 forms the bottom of the main control building block, and the first main control housing 301 and the second main control housing 302 fastening connection.
[0097] The first splicing part 305 is located on the side of the main control building b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com