Loading position area map updating method applied to open pit mine automatic driving
A map update and automatic driving technology, applied in navigation computing tools, road network navigators, etc., can solve the high cost, difficult to apply positioning and path planning requirements, update efficiency is difficult to meet the rapid update requirements of high-precision maps in open-pit mine scenarios, etc. problem, to achieve the effect of reducing computing power requirements and communication pressure, improving the efficiency of automatic driving, and reducing the probability of manual intervention
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
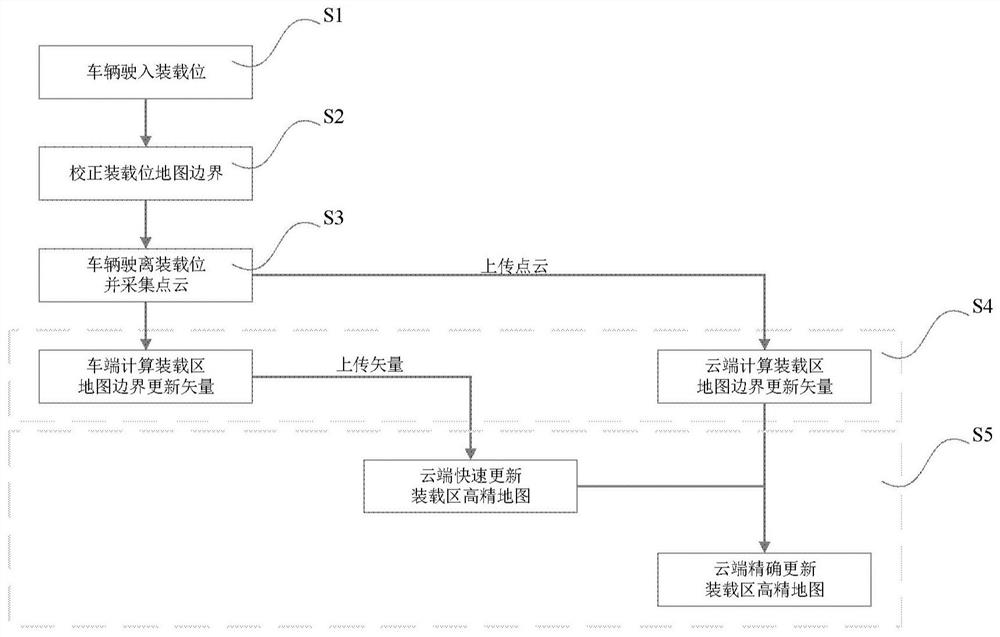
[0044] The present disclosure provides a method for updating a loading position area map applied to automatic driving in an open-pit mine.
[0045] In order to make the purpose, technical solutions and advantages of the present disclosure clearer, the present disclosure will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
[0046] Certain embodiments of the present disclosure will be described more fully hereinafter with reference to the accompanying drawings, in which some but not all embodiments are shown. Indeed, various embodiments of the disclosure may be embodied in many different forms and should not be construed as limited to the embodiments set forth herein; rather, these embodiments are provided so that this disclosure will satisfy applicable legal requirements.
[0047] In an exemplary embodiment of the present disclosure, a method for updating a loading location area map applied to autom...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com