Point cloud detection method and device, computer equipment and storage medium
A detection method and point cloud technology, which is applied to computer parts, calculation, character and pattern recognition, etc., can solve the problems of less information and more noise in point cloud, and achieve the effect of enriching dimensions and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
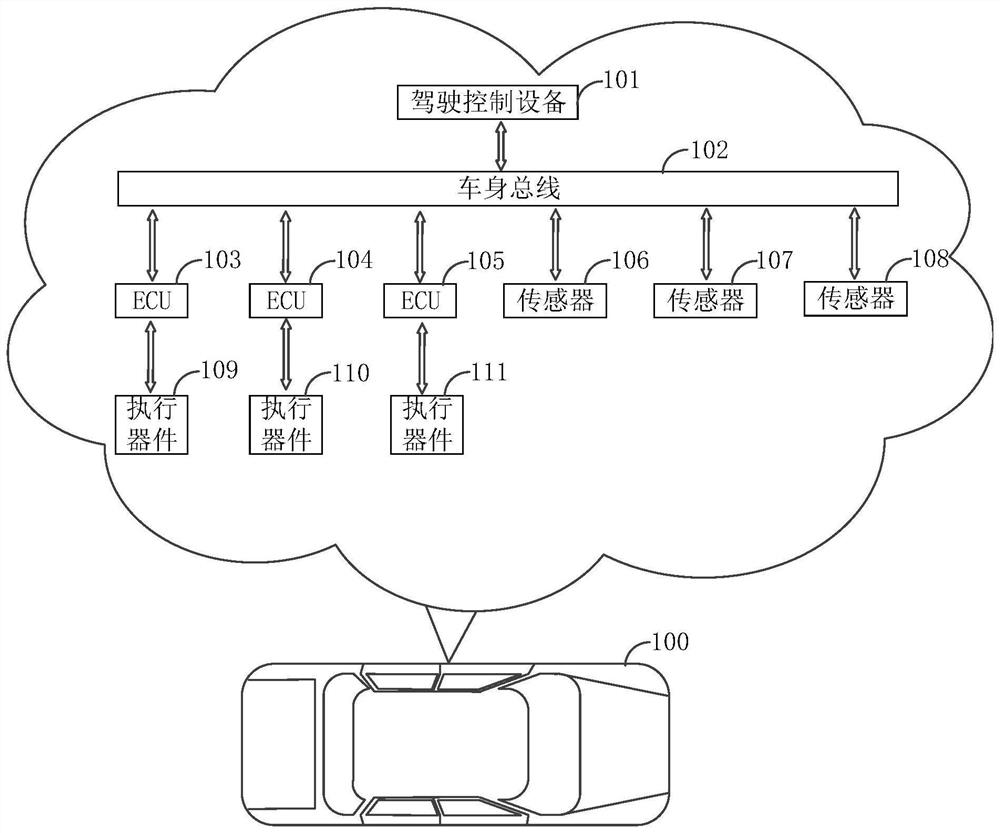
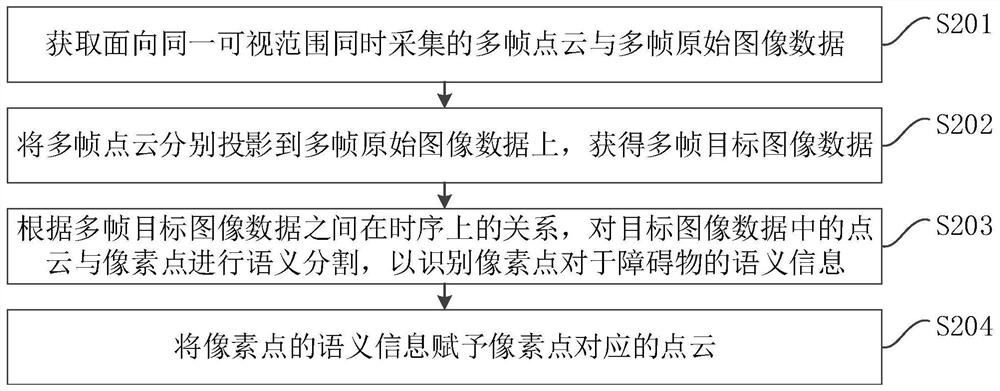
[0038] figure 2 It is a flow chart of a point cloud detection method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where image data is semantically analyzed according to time series and semantic information representing obstacles is given to the point cloud. This method can be composed of point cloud detection device, the point cloud detection device can be implemented by software and / or hardware, can be configured in computer equipment, for example, unmanned equipment such as unmanned vehicles, robots, unmanned aerial vehicles, and servers, personal Computing equipment such as computers, etc., the method specifically includes the following steps:
[0039] S201. Acquire multiple frames of point cloud and multiple frames of original image data that are simultaneously collected for the same visual range.
[0040] In this embodiment, the unmanned device is equipped with a laser radar and a camera, the laser radar is used to de...
Embodiment 2
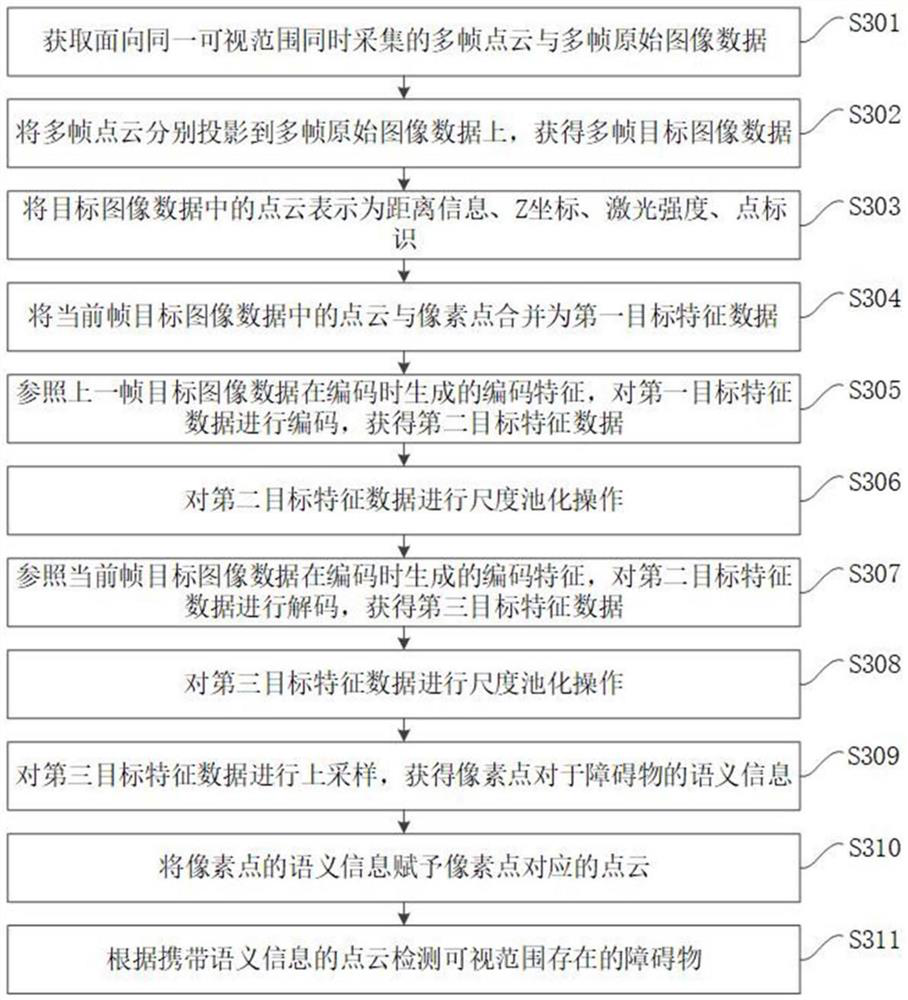
[0073] image 3 It is a flow chart of a point cloud detection method provided by Embodiment 2 of the present invention. Based on the foregoing embodiments, this embodiment further refines semantic segmentation and adds processing operations for obstacle detection. The method specifically includes the following steps :
[0074] S301. Acquire multiple frames of point cloud and multiple frames of original image data that are simultaneously collected for the same visual range.
[0075] In this embodiment, the unmanned device can collect point cloud and original image data in real time, identify the semantic information of pixels for obstacles and assign it to the point cloud, so that the point cloud can be used to detect obstacles. In addition, the unmanned device can also collect After the point cloud and original image data, the point cloud and original image data are sent to the computing device, and the computing device recognizes the semantic information of the pixel point f...
Embodiment 3
[0147] Image 6 A schematic structural diagram of a point cloud detection device provided in Embodiment 3 of the present invention, the device may specifically include the following modules:
[0148] Raw data acquisition module 601, configured to acquire multi-frame point cloud and multi-frame original image data collected simultaneously for the same visual range;
[0149] The point cloud projection module 602 is used to respectively project the point clouds of multiple frames onto the original image data of multiple frames to obtain target image data of multiple frames;
[0150] The semantic segmentation module 603 is configured to perform semantic segmentation on the point cloud and pixels in the target image data according to the temporal relationship between multiple frames of the target image data, so as to identify the relationship between the pixels and the obstacles. semantic information;
[0151] The semantic information assignment module 604 is configured to assign...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com