Control system and method for controlling operation of system
A control system, control range technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as needing Jacobian evaluation, expensive linearization, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] Some embodiments of the present invention provide a system and method for controlling the operation of a system or a system using a predictive controller. An example of a predictive controller is model predictive control (MPC) that determines control inputs based on the model of the controlled system. When the nonlinear model of the controlled system is used to determine the control input, this predictive controller is based on nonlinear model predictive control (NMPC).
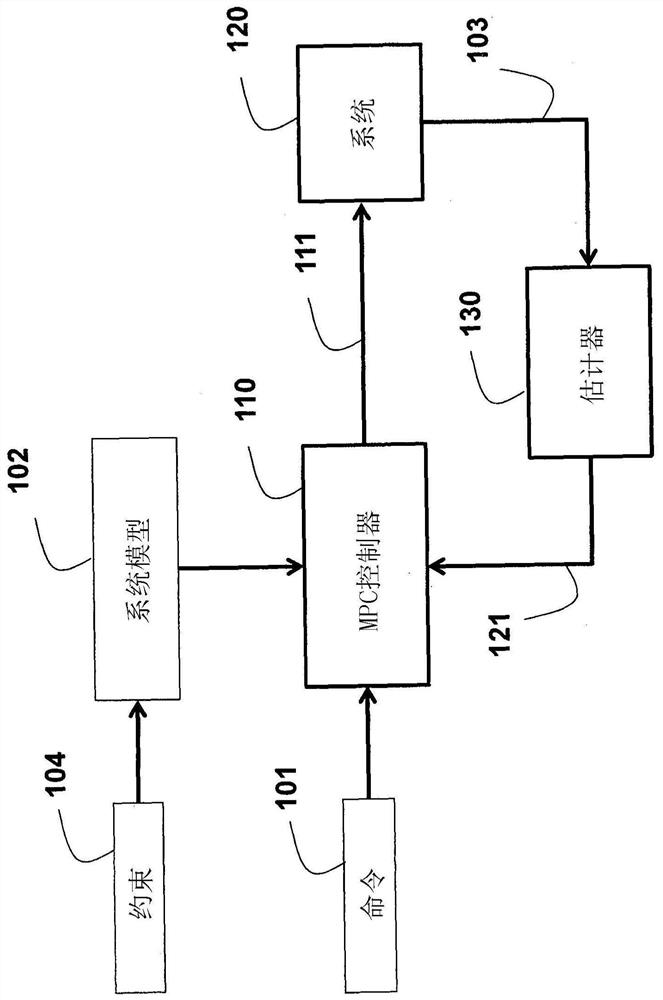
[0074] figure 1 An example system 120 connected to a control system (eg, predictive controller 110) via a state estimator 130 is shown. In some implementations, the predictive controller is an MPC controller planned according to the dynamic model 102 of the system. The model may be a system of equations that represents the state of the system 120 and changes in the output 103 over time as a function of the current and previous inputs 111 and the previous output 103. The model may include constraints 104...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com