a mechanical arm
A technology of manipulators and driving mechanisms, applied in the field of manipulators, can solve problems such as complex manipulator structures, inability to complete handling work, and less degrees of freedom, and achieve the effects of easy installation, increased vertically bearable force, and precise expansion and contraction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. Advantages and features of the present invention will be apparent from the following description and claims. It should be noted that the drawings are all in a very simplified form and use imprecise ratios, which are only used to facilitate and clearly assist the purpose of illustrating the embodiments of the present invention.
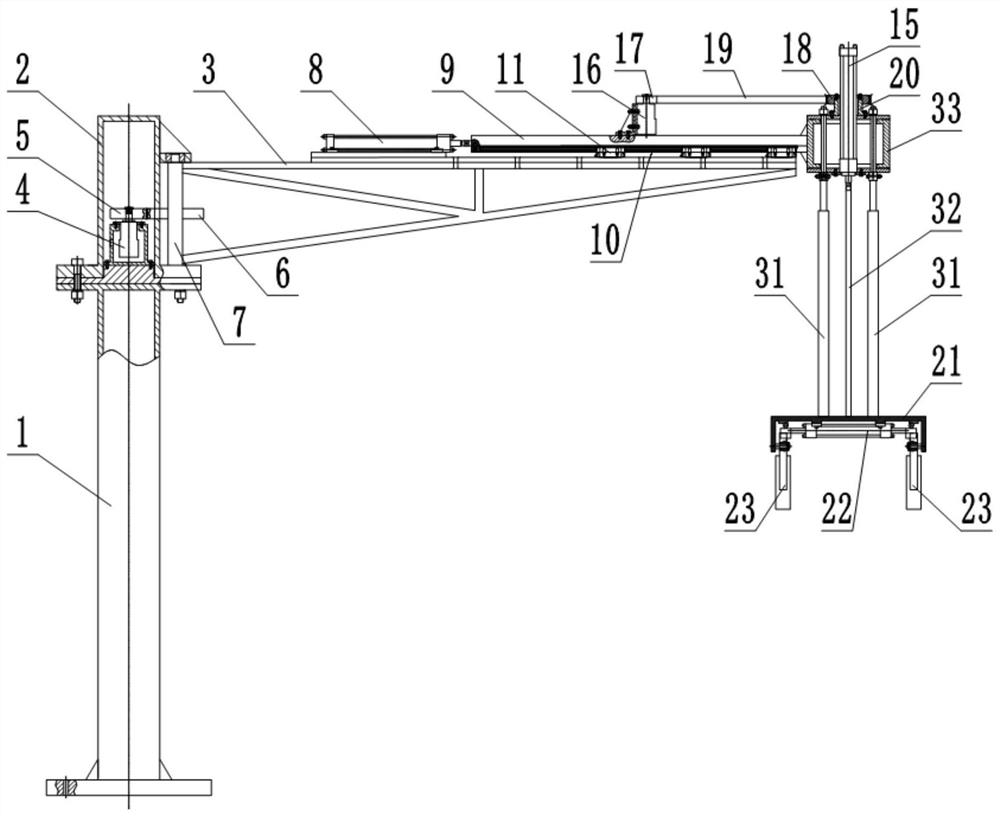
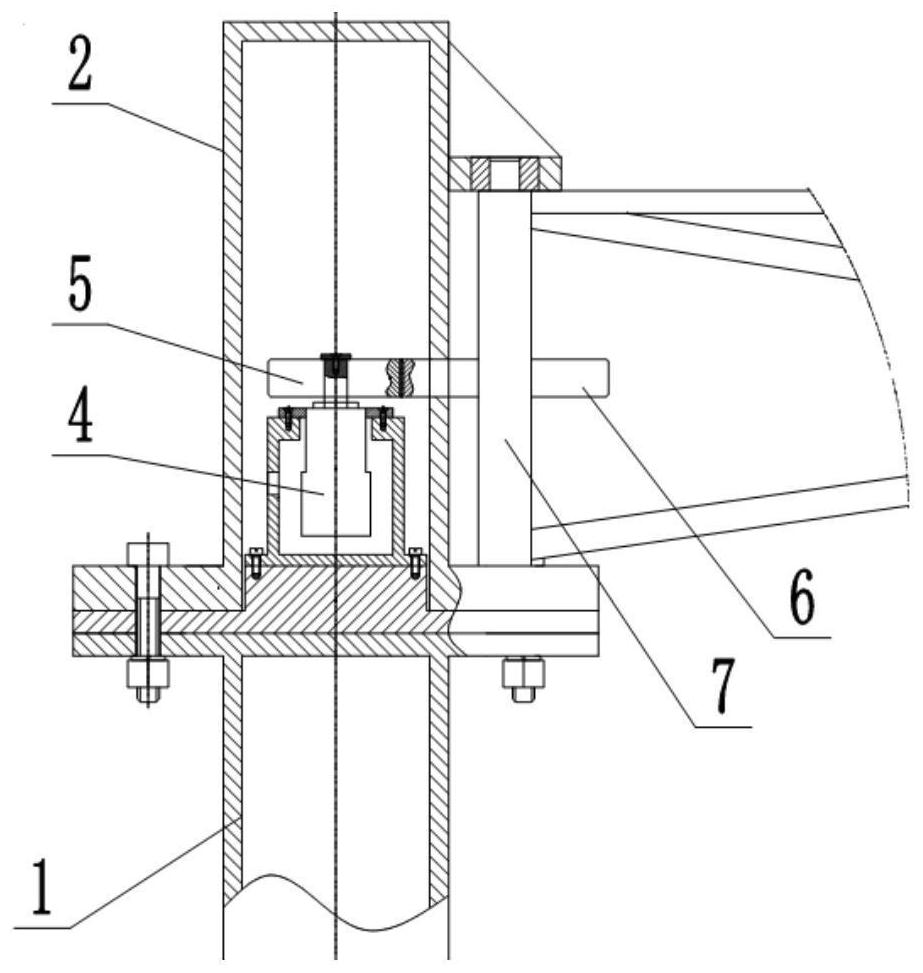
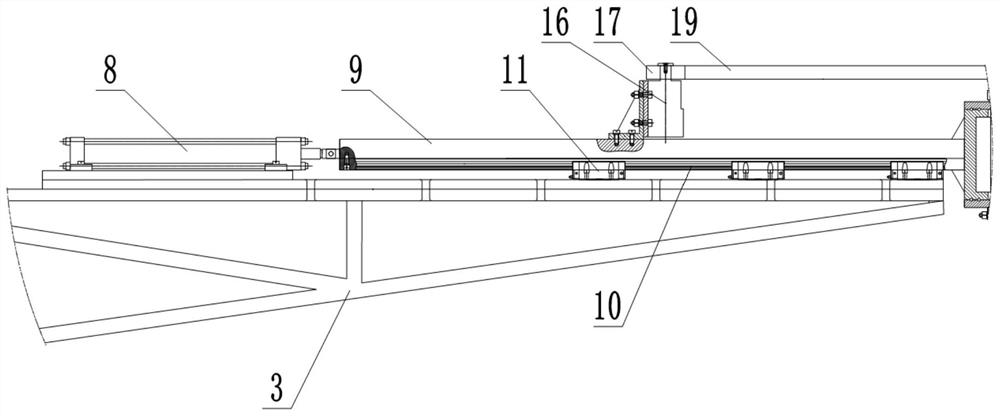
[0052] see figure 1 , the present invention provides a manipulator, comprising a base, a cross arm 3, a first driving mechanism, a second driving mechanism, a third driving mechanism, a fourth driving mechanism, a vertical arm and a clamping device, and the first driving mechanism drives the horizontal The arm 3 rotates horizontally relative to the base, the second drive mechanism drives the vertical arm to move linearly, the third drive mechanism drives the vertical arm to rotate, and the fourth drive mechanis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com