A Reinforcement Learning-Based Hierarchical Control Method for Salamander Robot Path Tracking
A technology of reinforcement learning and hierarchical control, applied in the control of finding targets, two-dimensional position/course control, vehicle position/route/altitude control, etc., can solve problems such as algorithm consumption, parameter optimization complexity, and large computing resources , to achieve the effect of eliminating static error, improving tracking accuracy and good control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
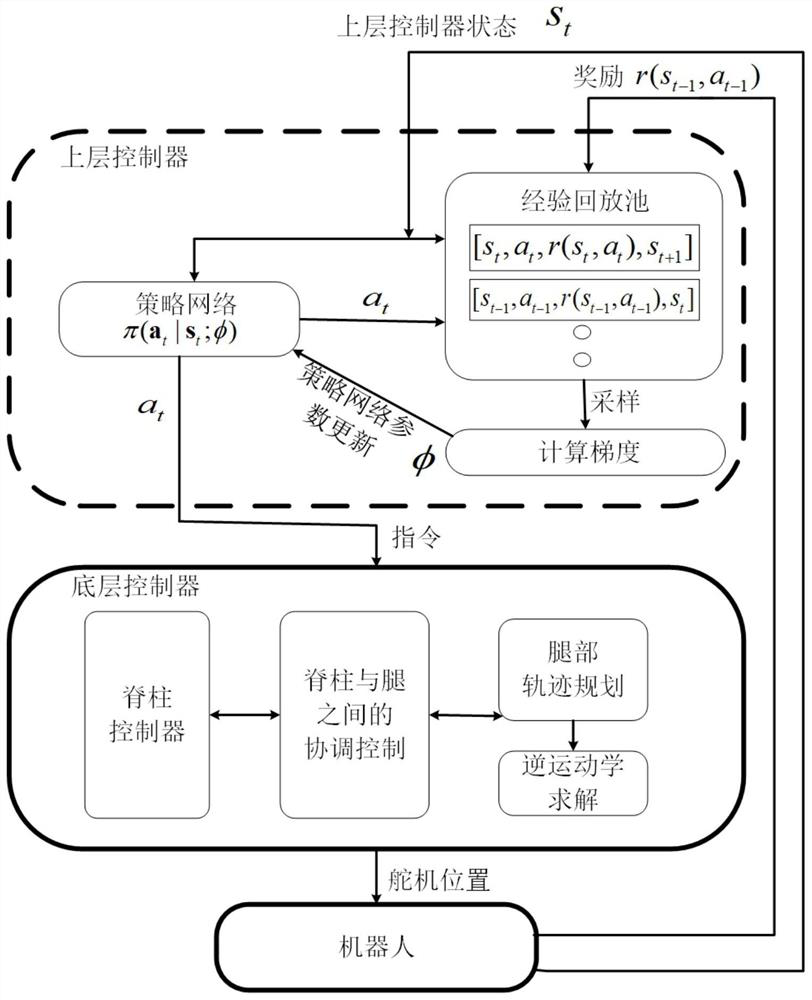
[0083] A reinforcement learning-based hierarchical control method for path-following of a salamander robot using a hierarchical control framework such as figure 1 shown),
[0084] The tracking path of the salamander robot is divided into two layers of controllers according to different tasks, which are the upper layer controller based on reinforcement learning and the bottom layer controller based on inverse kinematics. The upper layer controller based on reinforcement learning includes the design of state space, action Space design and reward function design, the bottom controller includes spine controller and leg controller, and the leg controller is composed of trajectory generation module and inverse kinematics solution module. Specifically, the state and action of the robot at time t are s t ,a t , the reward obtained at the last moment is r(s t-1 ,a t-1 ), in the training phase, the upper controller inputs r(s t-1 ,a t-1 ) and s t , then output action a t , actio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com