Path tracking method of semi-trailer train based on model predictive control
A model predictive control, technology of automobile trains, applied in the field of path tracking of semi-trailer automobile trains
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0101] The present invention is described in detail below in conjunction with accompanying drawing:
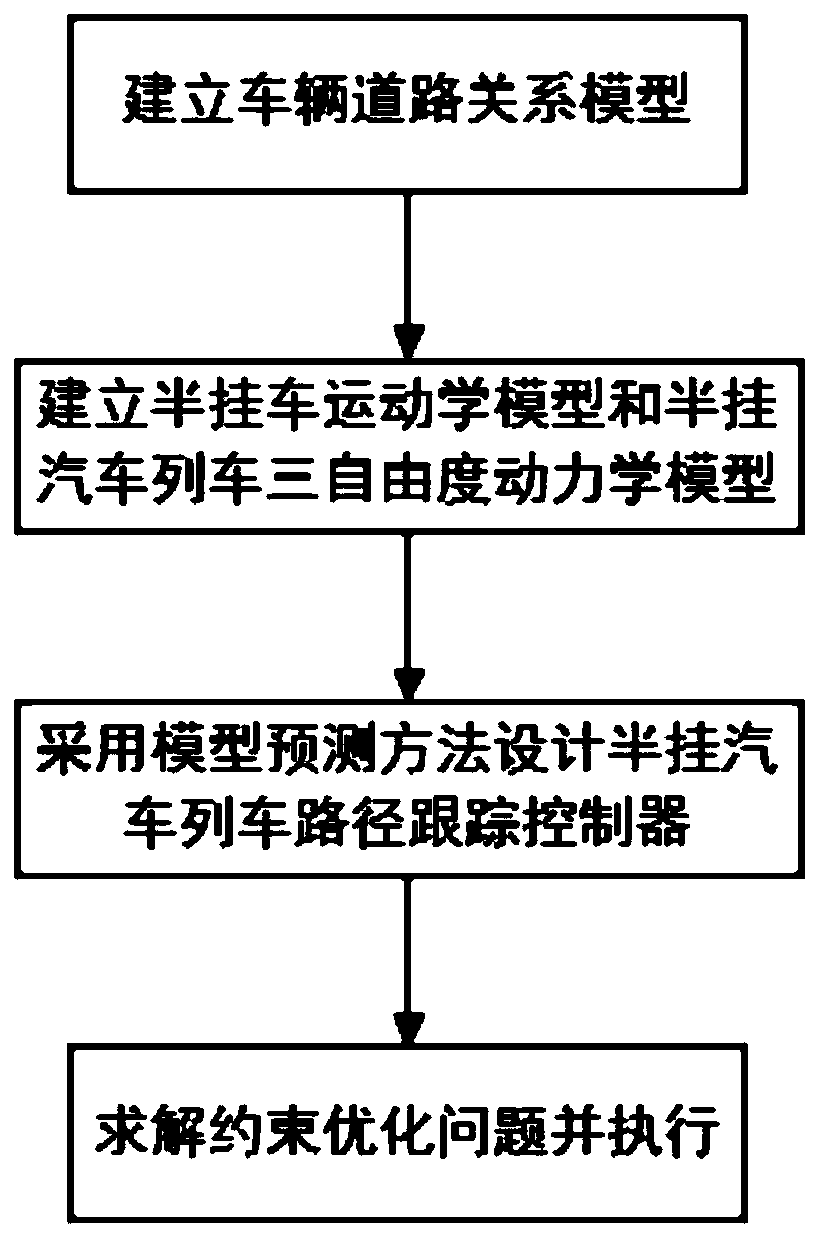
[0102] The present invention proposes a path tracking method for semi-trailer trains based on model predictive control, such as figure 1 As shown, the semi-trailer train is composed of a tractor and a semi-trailer, and the tractor and semi-trailer are articulated through the fifth wheel. This method makes the semi-trailer as fast as possible under the condition of considering the kinematic constraints of the semi-trailer train and the physical constraints of the actuator It is possible to drive along the centerline of the road, and at the same time reduce the control action of the actuator as much as possible to achieve the purpose of energy saving. It is characterized in that the specific steps of this method are as follows:
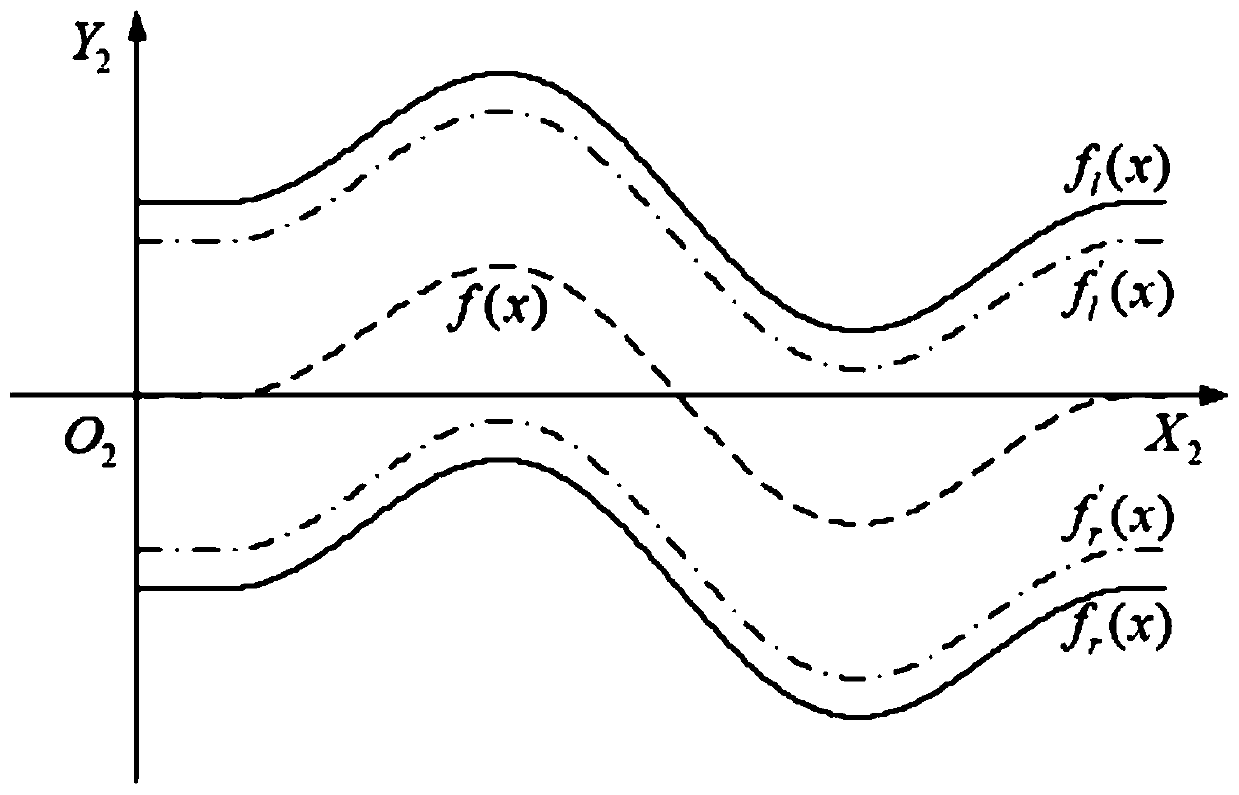
[0103] Step 1. Establish vehicle-road relationship model:
[0104] Establish the earth coordinate system, the origin O is fixed at the center of mass...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com