Intelligent climbing auxiliary robot
A robot and intelligent technology, applied in climbing, sports accessories, etc., can solve the problems of not being able to drive the seat belt, affecting the switching operation of climbing poles, and easily causing fear of heights, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
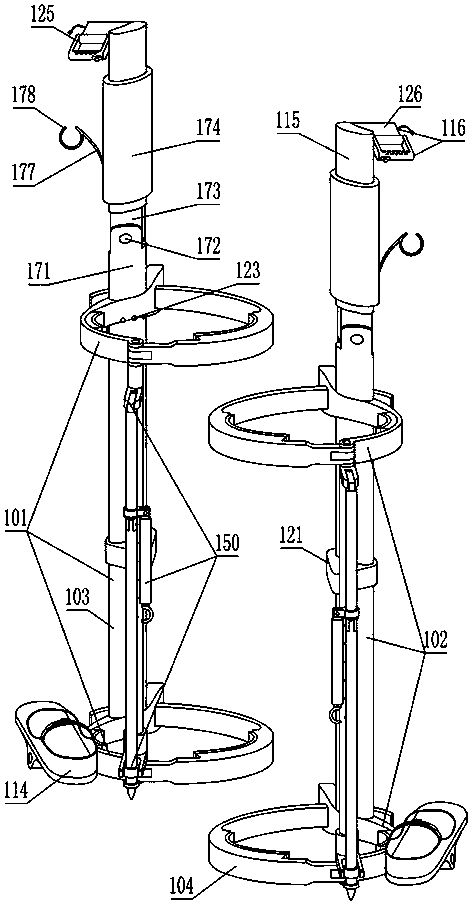
[0048] As shown in the figure, the intelligent climbing assistant robot includes a left and right pole frame 101 and a right pole frame 102 arranged symmetrically. Both the left pole frame and the right pole frame include a pole frame column 103. A rod holder ring 104 is provided. The rod frame ring includes a fixed half ring 105 fixedly connected to the rod frame column, one end of the fixed half ring is hinged with a movable half ring 107 through a ring hinge shaft 106, and the movable half ring is composed of a hinge section 108 connected with the ring hinge shaft and the following The axis line of the ring hinge shaft is formed by an arc segment 109 extending in the shape of a circular arc at the center of the circle. Arc racks 110 arranged in an arc shape along the extending track of the arc segment are arranged on the side wall of the arc segment. The other end of the fixed half-ring is provided with a locking slideway 111 that is slidably fitted with the arc segment, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com