Discrete terminal sliding mode model-free control method with disturbance observer
A disturbance observer and terminal sliding mode technology, applied in general control systems, control/regulation systems, instruments, etc., can solve the problems of complex modeling process, unsatisfactory control effect, and difficulty in achieving the effect, so as to increase anti-interference. performance, satisfactory control performance, and the effect of reducing industrial energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
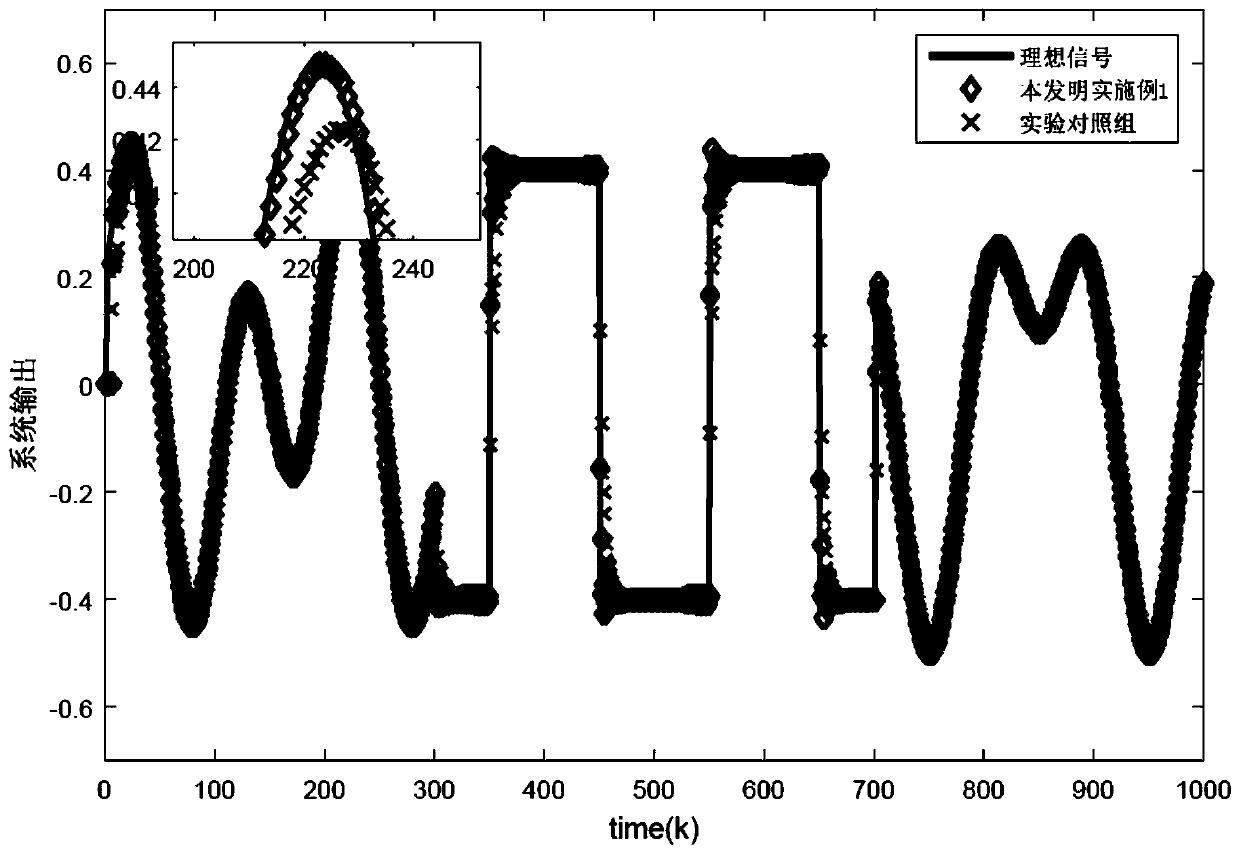
Embodiment 1
[0102] The controlled object of the present embodiment is a nonlinear system with non-minimum phase in SISO, Single Input and Single Output, and its system model is:
[0103]
[0104] Expected input from the system:
[0105] In an embodiment, n=9. The value of the control input linearization length constant L is usually set according to the complexity of the controlled object and the actual control effect, generally between 1 and 10, too small will affect the control effect, too large will lead to a large amount of calculation, so generally Usually take 3 or 5, in this embodiment L=3.
[0106] The experimental control group in this example only uses the partial scheme model-free adaptive control u p (k), its parameter setting: ρ is taken as 0.5, υ=1, u(1:5)=0, y(1:6)=0, du(1:3)=0, φ 1 (1:5)=1,φ 2 (1:5)=0.5,φ 3 (1:5) = 0.5.
[0107] The parameter setting of present embodiment: ρ all gets 0.5, υ=1, l 1 =0.8,l 2 =0.5,l 3 =0.8, γ=2 / 11, Γ=1, Λ=0.8, Ω s =0.002, ε=0.00...
Embodiment 2
[0113]The controlled object of this embodiment is a double-capacity water tank system, and its transfer function is:
[0114]
[0115] In an embodiment, n=9. The value of the control input linearization length constant L is usually set according to the complexity of the controlled object and the actual control effect, generally between 1 and 10, too small will affect the control effect, too large will lead to a large amount of calculation, so generally Usually take 3 or 5, in this embodiment L=3.
[0116] The experimental control group of the present embodiment adopts the control method combining the compact model-free adaptive control and the sliding mode control based on the general discrete reaching law, and its controller is: u(k)=Hu j (k)+Ku sm (k), the controller is classified into compact model-free adaptive control u j (k) and sliding mode control u based on general discrete reaching law sm (k);
[0117] Compact Form Model-Free Adaptive Control
[0118] In t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com