Anti-sway control method for loop-opening fuzziness of bridge type crane
An overhead crane and anti-sway technology, applied in computational models, biological models, instruments, etc., can solve the problems of difficult application, dependence, and many external interferences, so as to improve work efficiency and operation stability, and reduce anti-sway distance. and anti-shake time, the effect of improving operational safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
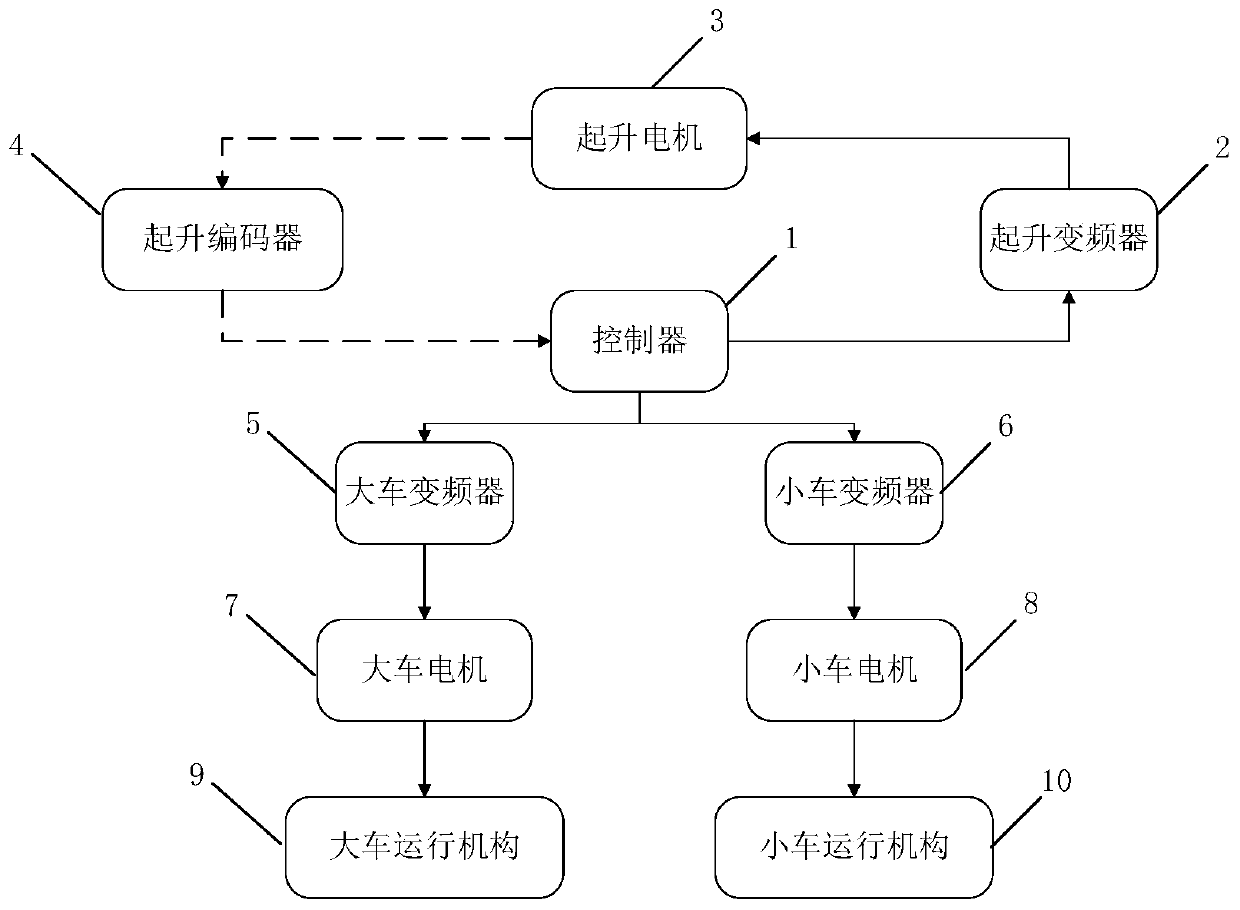
[0030] Such as figure 1 As shown, the control system adopted by the open-loop fuzzy anti-sway control method for bridge cranes of the present invention includes a controller 1, a lifting frequency converter 2, a lifting motor 3, a lifting encoder 4, a cart frequency converter 5, and a trolley frequency converter 6. Cart motor 7, trolley motor 8, cart running mechanism 9, trolley running mechanism 10, etc. Among them, the controller measures the rope length in real time according to the expected running speed set by the cart and trolley and the rope length sensor, calculates the running speed of the cart and trolley and the initial angle at the beginning of the deceleration phase, and passes the frequency converter of the cart and the trolley respectively. The driver drives the running mechanism of the cart and the running mechanism of the trolley to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com