A method, device and system for precise parking of trucks in shore crane area
A truck, precise technology, applied in the field of intelligent transportation, can solve the problems of slow speed, large error, not suitable for precise parking of large trucks, etc., to achieve the effect of strong portability and low implementation cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
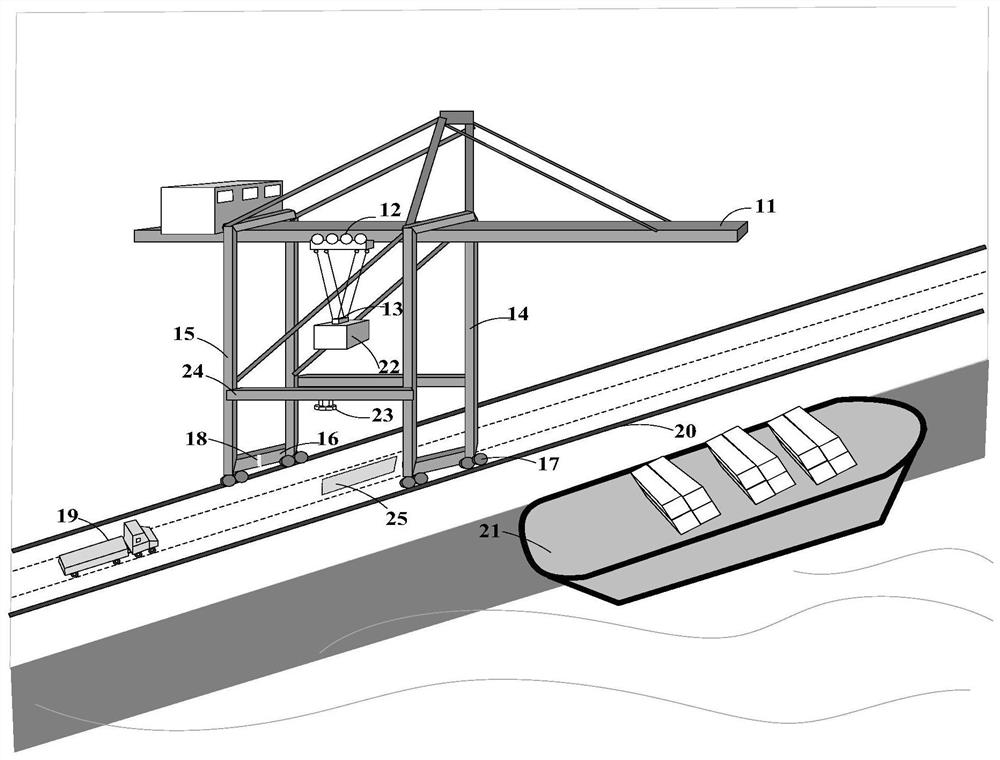
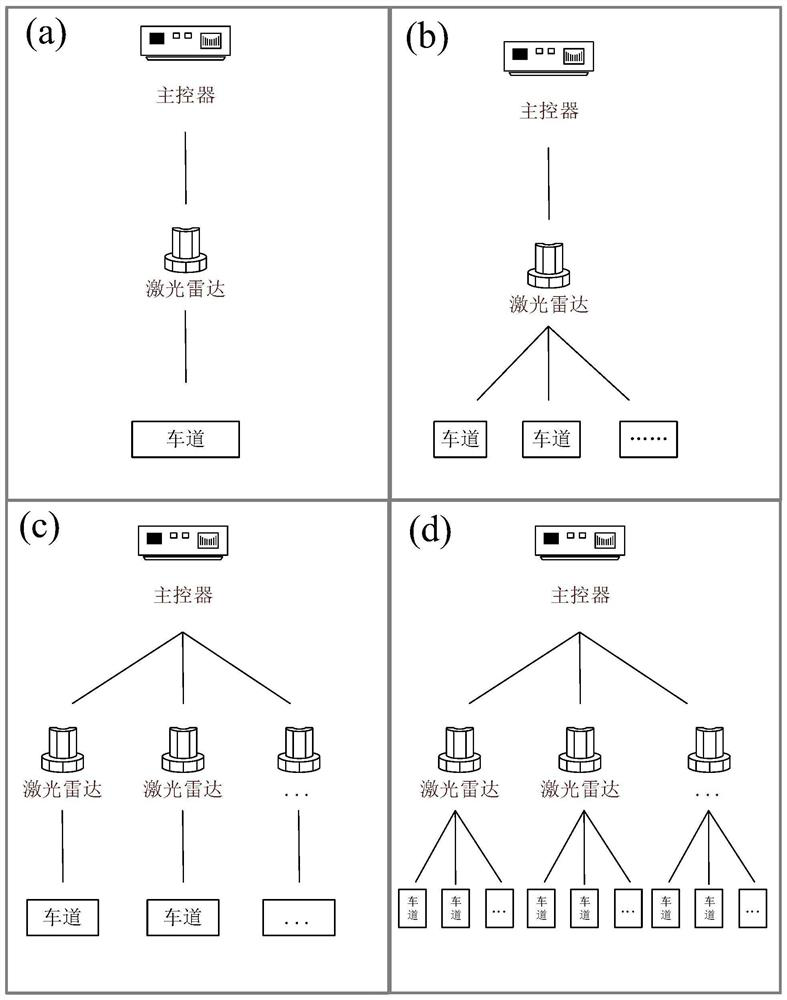
[0144] Such as Figure 5 As shown, the quay crane numbered AD1000 spans 6 lanes numbered E1~E6, and the bottom of the contact beam of the quay crane is equipped with 6 laser radars numbered Lidar1~Lidar6, and Lidar1~Lidar6 scan E1~Lidar6 respectively. E6, that is, each laser radar is responsible for scanning a lane, and the main controller M is connected to the laser radars Lidar1~Lidar6, and is responsible for the precise parking of trucks on each lane under the shore crane AD1000.
[0145] The main controller M locally stores the following information:
[0146] (1) Lidar numbers Lidar1~Lidar6;
[0147] (2) Shore crane number AD1000;
[0148] (3) Lane numbers E1~E6;
[0149] (4) The first model library and the second model library, wherein the vehicle point cloud model in the first model library corresponds to the truck loaded with containers, and the vehicle point cloud model in the second model library corresponds to the truck without container , the vehicle model of th...
Embodiment 2
[0164] Such as Figure 6 As shown, the quay crane numbered AD1000 spans 6 lanes numbered E1~E6 respectively. Two laser radars numbered Lidar1 and Lidar2 are installed at the bottom of the contact beam of the quay crane. Lidar1 is responsible for scanning the lanes E1~E3 , Lidar2 is responsible for scanning E4~E6, that is, each lidar is responsible for scanning 3 lanes, and the main controller M is connected to lidar Lidar1 and Lidar2, and is responsible for the precise parking of trucks on each lane under the shore crane AD1000.
[0165] The main controller M locally stores the following information:
[0166] (1) Lidar numbers Lidar1, Lidar2;
[0167] (2) Shore crane number AD1000;
[0168] (3) Lane numbers E1~E6;
[0169] (4) The first model library and the second model library, wherein the vehicle point cloud model in the first model library corresponds to the truck loaded with containers, and the vehicle point cloud model in the second model library corresponds to the tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com