Method and device for controlling pan-tilt tracking camera shooting
A technology for controlling PTZ and PTZ, which is applied in image communication, machine/stand, components of color TV, etc. It can solve the problems of PTZ vibration, tracking target overshoot, and reducing the success rate of target detection.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
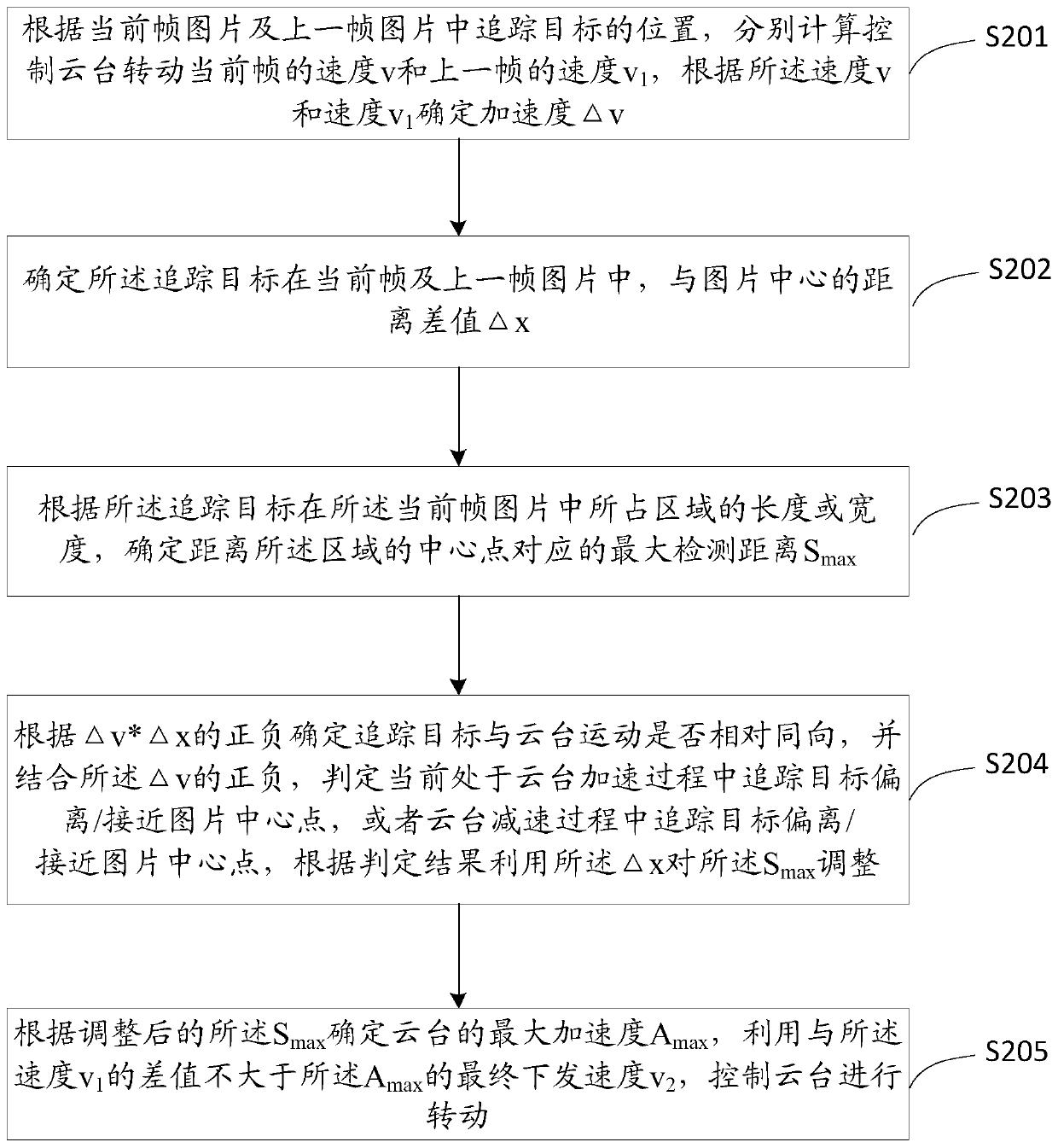
[0123] See figure 2 The steps S201 to S205 shown are specific flowcharts of a method for controlling the PTZ camera to track and perform the following steps:
[0124] Step S201: Calculate the speed v of the current frame and the speed v of the previous frame for controlling the rotation of the pan / tilt according to the position of the tracking target in the current frame picture and the previous frame picture. 1 , According to the speed v and speed v 1 Determine the acceleration △v;
[0125] First of all, the PTZ camera will detect the current frame picture and the previous picture in the captured video. When the tracking target appears in the current frame picture and the previous frame picture, the PTZ camera will obtain the tracking target. The current frame picture and the previous frame picture.
[0126] Specifically, the target detection algorithm is used to detect whether there is a tracking target in the acquired current frame of the picture. The tracking target can be a mov...
Embodiment 2
[0167] The embodiment of the present invention calculates v and v according to the position of the tracking target in the current frame picture and the previous frame picture, and uses a motion control algorithm. 1 , The motion control algorithm will make corresponding adjustments according to the position of the tracking target relative to the picture;
[0168] The calculation method of the motion control algorithm to calculate the speed v and v1 of the pan / tilt is specifically to set the constant coefficient K of the pan / tilt proportional term according to the parameters of the pan / tilt camera. p , The constant coefficient of the integral term is set to K i ,According to the distance e between the tracking target and the center of the frame in the i i Calculate the speed value, the i-th frame is the current frame or the previous frame, where the distance value e i They are the horizontal distance value and the vertical distance value.
[0169] As an optional implementation manner,...
Embodiment 4
[0190] In order to prevent the target from being stopped for a short period of time during the movement, and then returning to the movement state to make the gimbal rotate, excessive mechanical loss caused by repeated movement stops in a short period of time;
[0191] As an optional implementation manner, a low-speed target anti-vibration method is adopted. When a tracking target with a slower motion speed is tracked and the target is in a specific area, the motion speed of the gimbal is adjusted to 0;
[0192] According to the magnification of the lens, the area where the width and height of the current picture is reduced by a certain ratio is determined as the central area, such as Image 6 As shown, when a tracking target is detected in the central area 601, it is judged whether the pan-tilt needs to stop running.
[0193] Among them, each final issued speed v issued in embodiment 2 2 Have been stored, specifically, the historical distribution speed v 2 Stored in the issued speed a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com