Method for automatically measuring and correcting welding gun gesture of welding robot
A welding robot and automatic measurement technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve problems affecting welding or glue quality, track deviation, tool offset, etc., to improve welding movement The effect of trajectory accuracy, improved accuracy, and reduced calibration time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings.
[0027] see Figure 1 to Figure 6 , the present invention provides a method for automatically measuring and correcting the posture of a welding torch of a welding robot, which is realized according to the following steps:
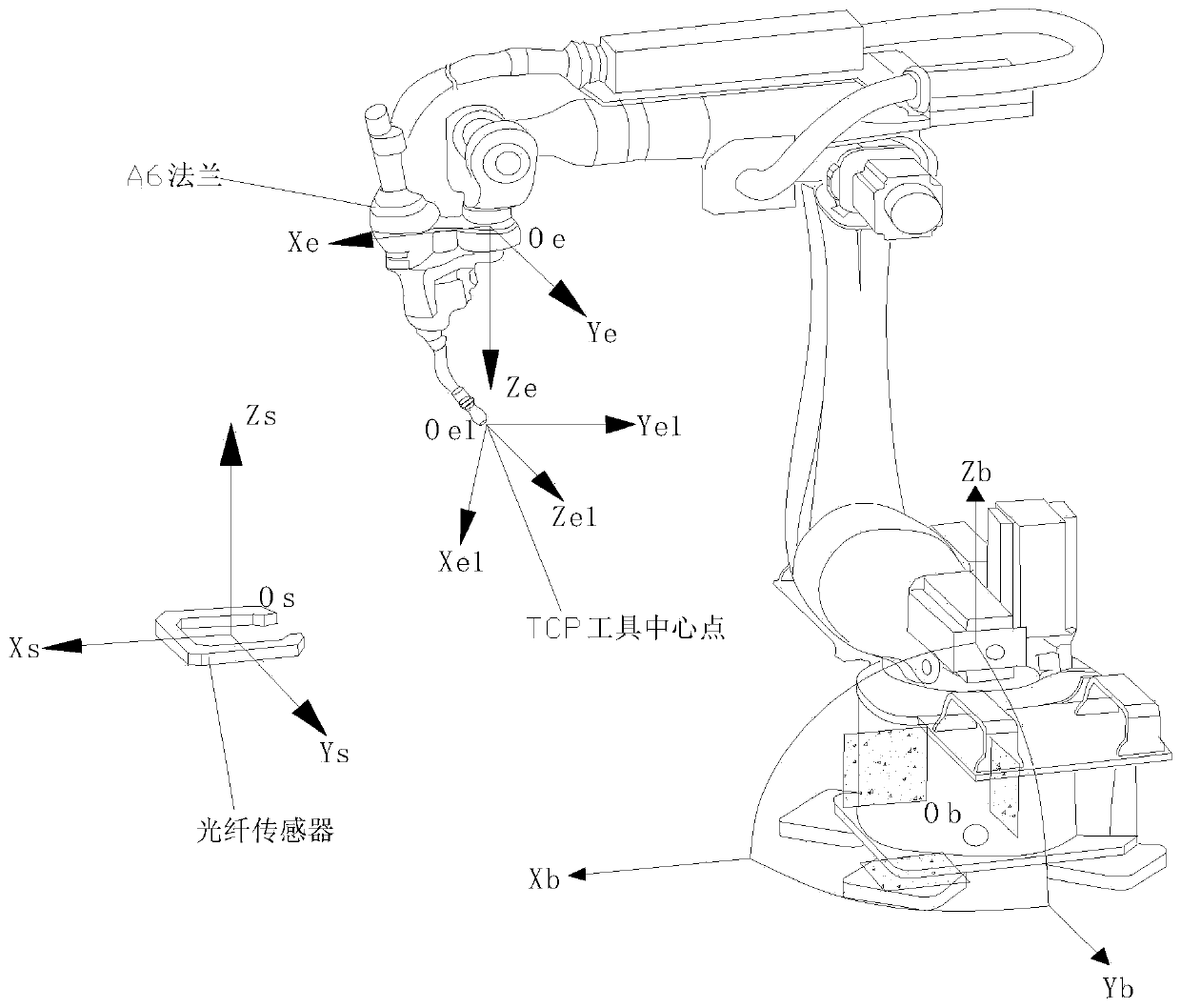
[0028] Step S1: Build a hardware environment, connect the welding robot with the first optical fiber sensor, the second optical fiber sensor, and the controller to ensure normal communication; install the first optical fiber sensor and the second optical fiber sensor on the same plane;
[0029] Step S2: establish a coordinate system, the sensor coordinate system O constructed with the ray intersection point of the first optical fiber sensor and the second optical fiber sensor as the origin S x S Y S Z S , X s Axis, Y s Axis, Z s The axis direction is consistent with the root coordinate system direction of the welding robot; the tool coordinate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com