Unmanned aerial vehicle group path planning method
A technology for path planning and drones, applied in the field of drones, can solve the problem that a single high-quality waypoint is not learned
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
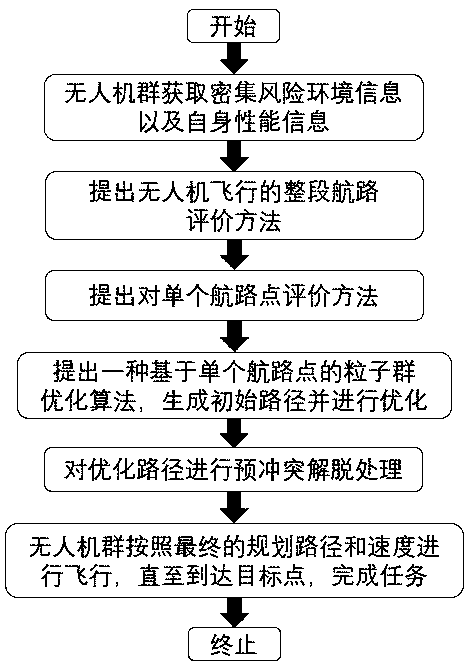
[0082] In the first step, the drone swarm obtains information about the unknown environment, including the location of the starting point and target point in the unknown environment, the coordinates of obstacles, and possible enemy radar and missile risks, and knows the flying targets and missions of the drone swarm Etc., these are to consider these factors when planning the path of the UAV group to ensure the flight safety of the UAV group. At the same time, when planning the path of the UAV group, it is also necessary to consider the performance limitations or requirements of the UAV itself. For example, the UAV cannot fly beyond its maximum horizontal turning angle and maximum vertical pitch angle, and the UAV's During the flight, in order to perform missions to carry out reconnaissance strikes against the enemy, the flight altitude cannot exceed a certain altitude, that is, the maximum reconnaissance strike altitude.
[0083] The second step is to propose an evaluation method...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com