Pose estimation method and device based on binocular vision inertial odometer and processor
A binocular vision and odometer technology, applied in the field of robotics, can solve the problems of low positioning accuracy of visual positioning algorithms, and achieve the effects of flexible debugging, reduced cumulative errors, and reduced computing time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
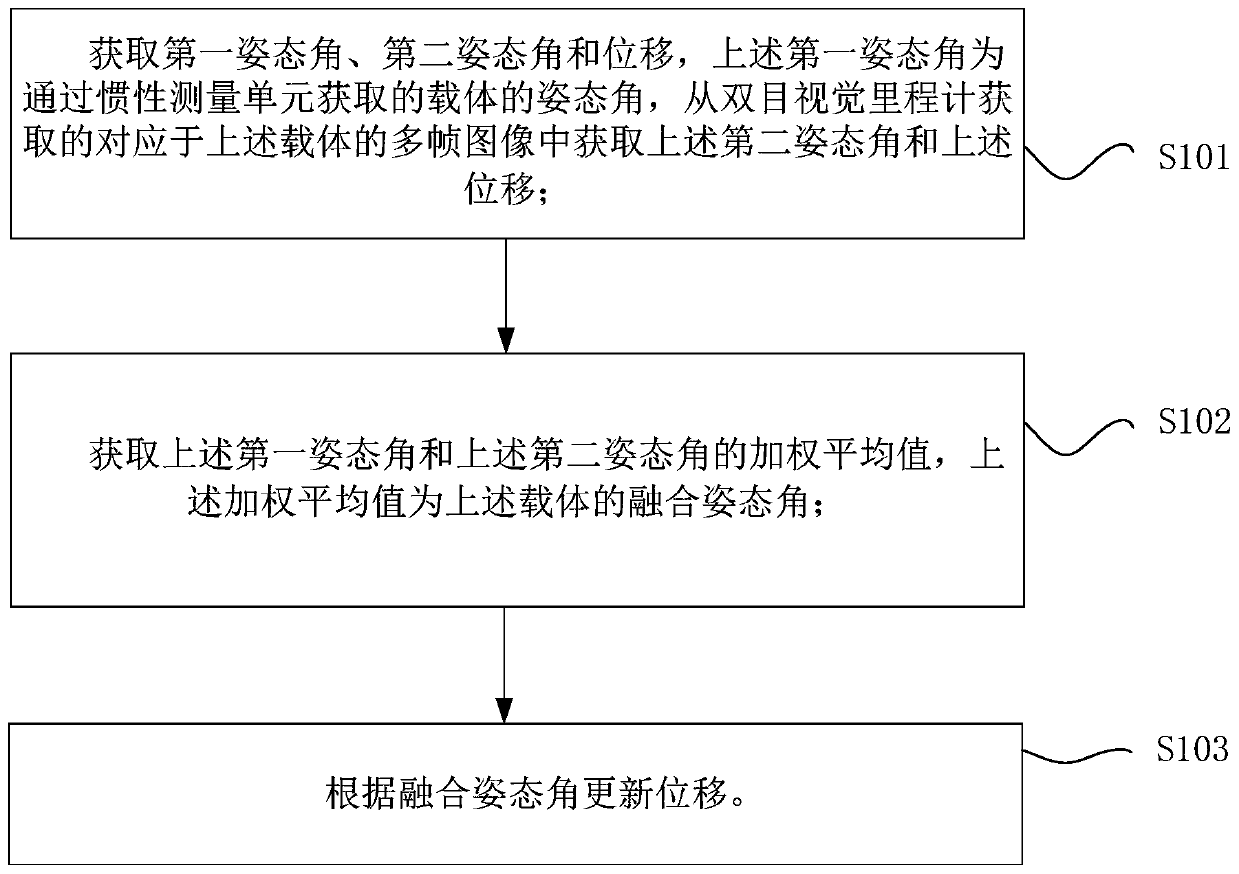
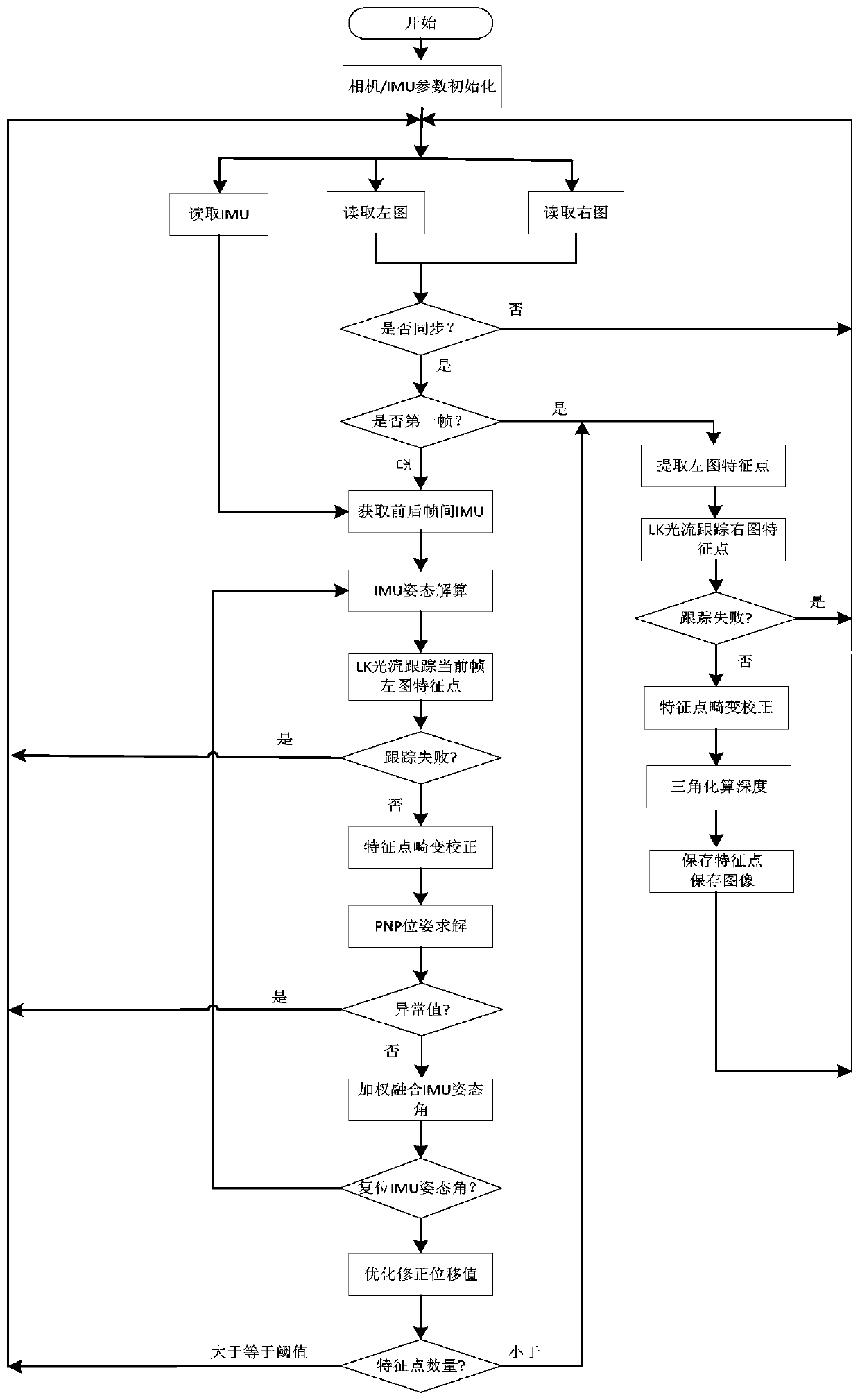
[0095] This embodiment relates to a specific method for estimating pose based on binocular visual-inertial odometer, such as image 3 As shown, it is a flowchart of a method for estimating pose based on binocular visual-inertial odometer, which specifically includes the following steps:
[0096] 1) Initialization of other correlation coefficients such as binocular camera pinhole imaging model parameters, inertial measurement unit device error model parameters, etc.;
[0097] 2) Collect the left and right images of the binocular camera and the original output of the inertial measurement unit;
[0098] 3) The first frame of image is used as feature point initialization, specifically by extracting Shi-Tomas corner points from the left image, and saving the feature points;
[0099] 4) Use the LK optical flow method to track the feature points extracted on the left picture in the previous step on the right picture, and save the tracking point pair;
[0100] 5) Perform distortion ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com