Intelligent vehicle cooperative lane changing decision-making model under road section mixed driving condition
A technology of intelligent vehicles and conditions, applied in the research field of intelligent transportation systems and intelligent vehicles, can solve the problems of potential safety hazards of decision-making control systems, limiting the potential of unmanned vehicles to pass, and immature automatic driving functions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
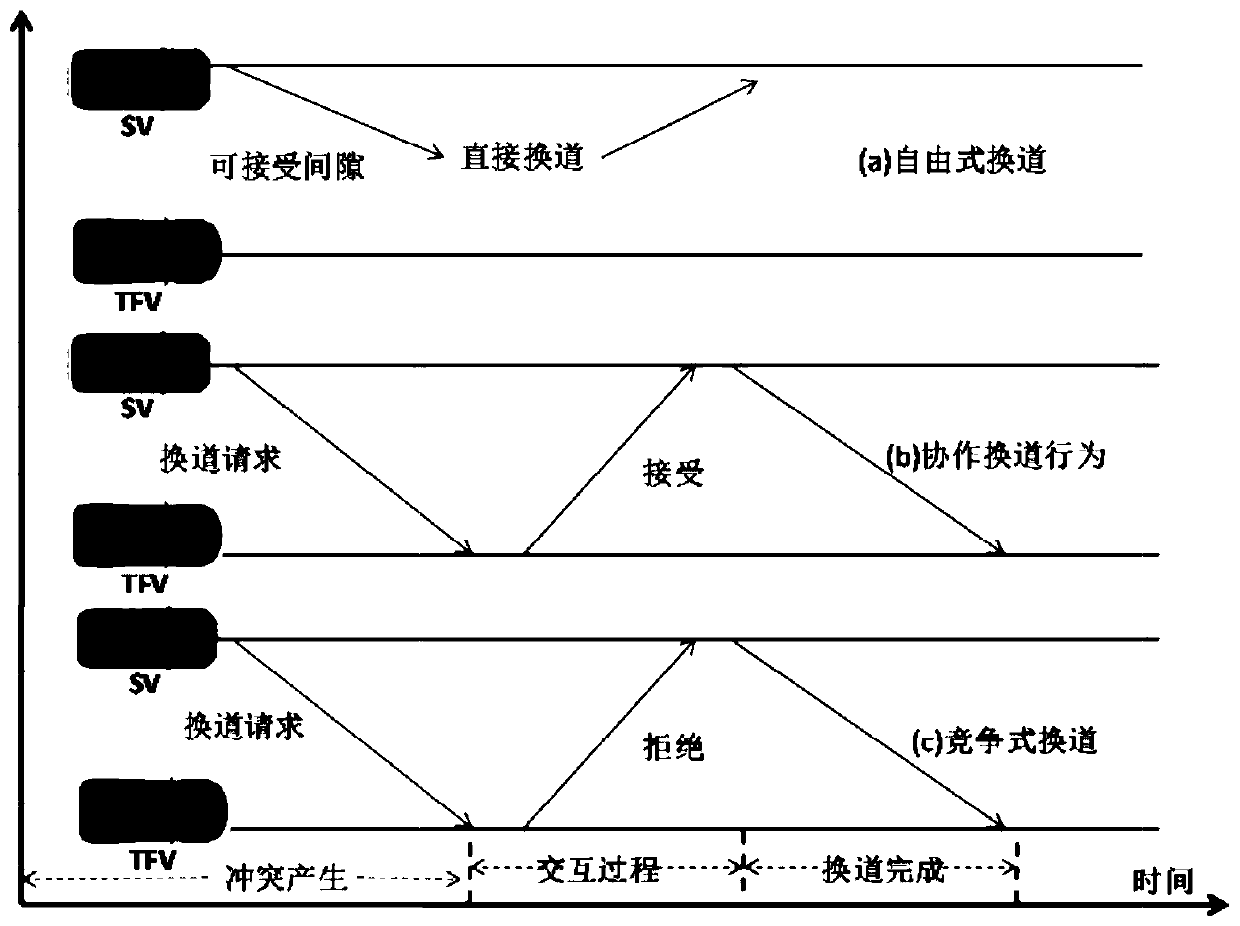
[0248] Such as figure 1 As shown, the driving state of unmanned vehicles and manned vehicles is obtained based on the environment perception module, and the vehicle interaction relationship judgment model is established by using fuzzy reasoning, and the prediction results are obtained for unmanned vehicle decision-making.
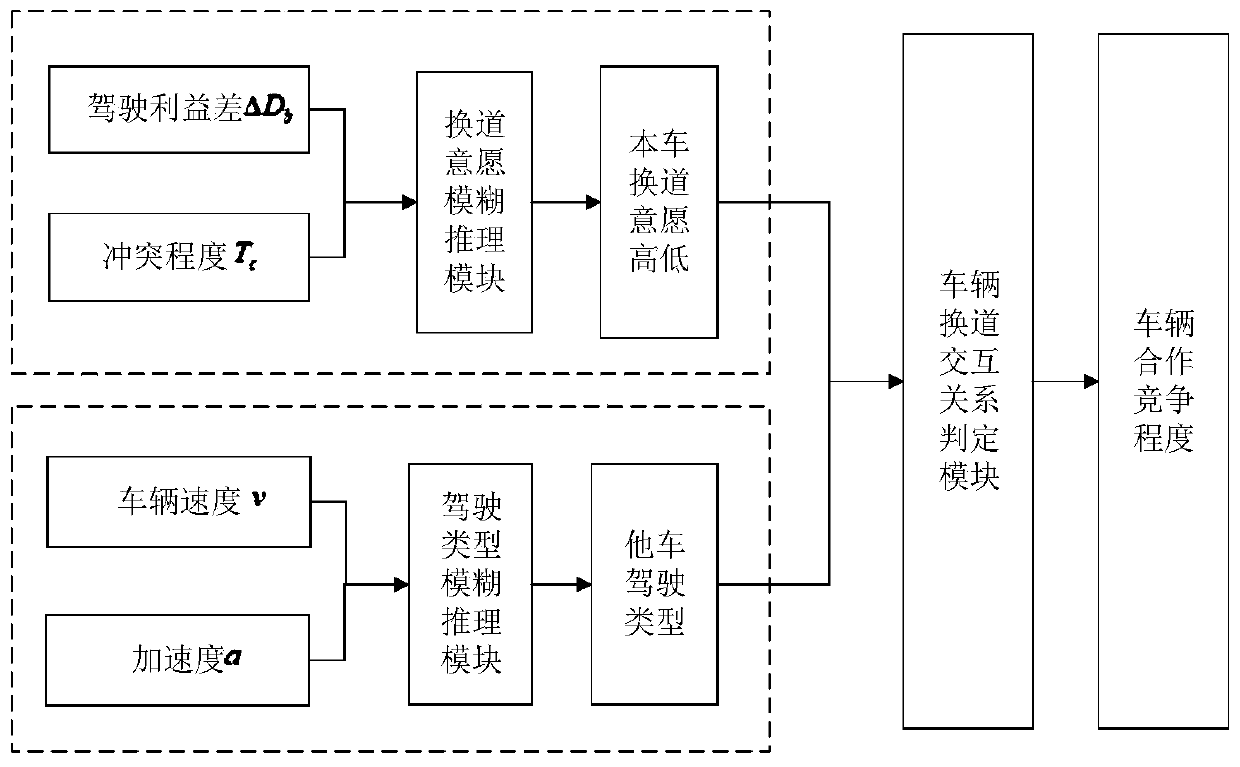
[0249] Such as figure 2 As shown, combined with the understanding of the interaction characteristics of lane-changing behavior, when establishing the vehicle lane-changing interaction relationship judgment model, it is divided into two steps: the first step is to judge the lane-changing willingness of the target vehicle in the original lane; the second step is to judge The driving type of the following vehicle in the target lane. Combining the above two steps to infer the interaction relationship between vehicles, it indicates the degree of cooperation between vehicles.
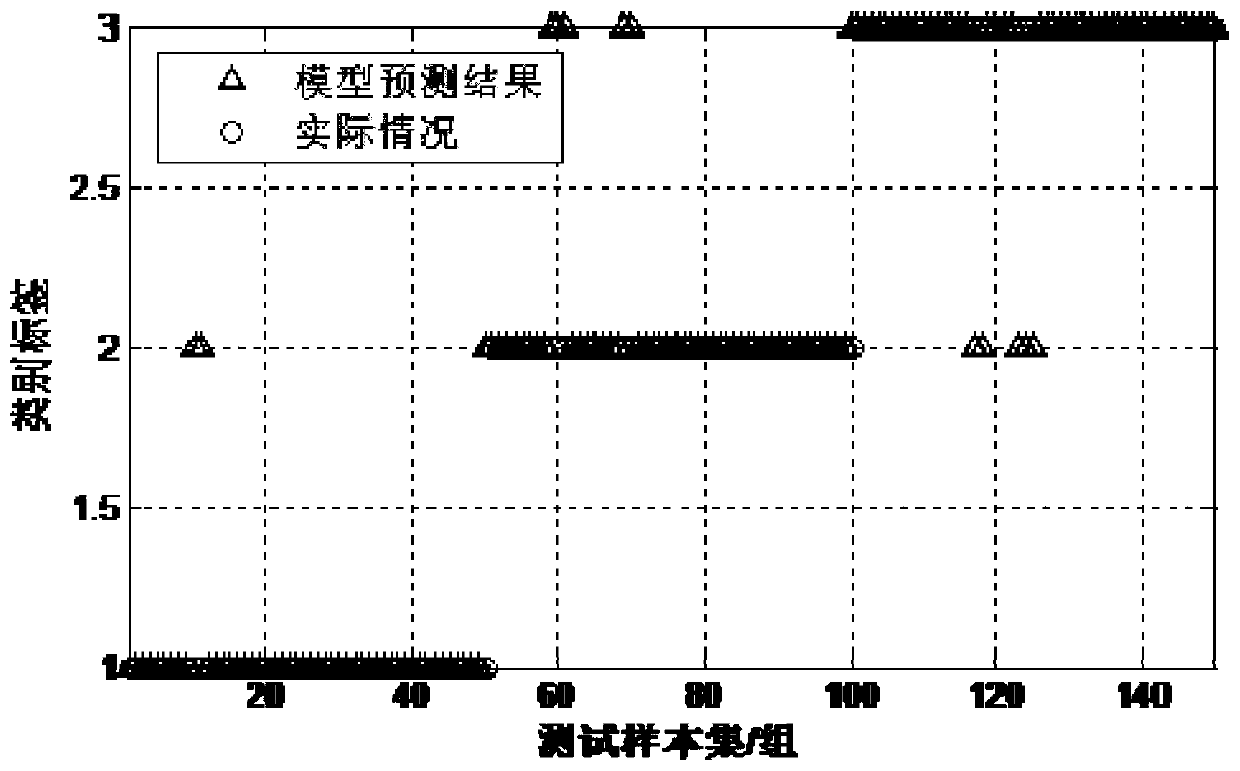
[0250] Such as image 3 As shown, 150 groups of real road section lane-changing da...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com