


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Automatic recognizing and grabbing method and system
An automatic identification and automatic technology, applied in the direction of instruments, manipulators, program control manipulators, etc., can solve the problems of high cost and low efficiency of manual verification, and achieve the effect of reducing the cost of verification and improving the efficiency of verification.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
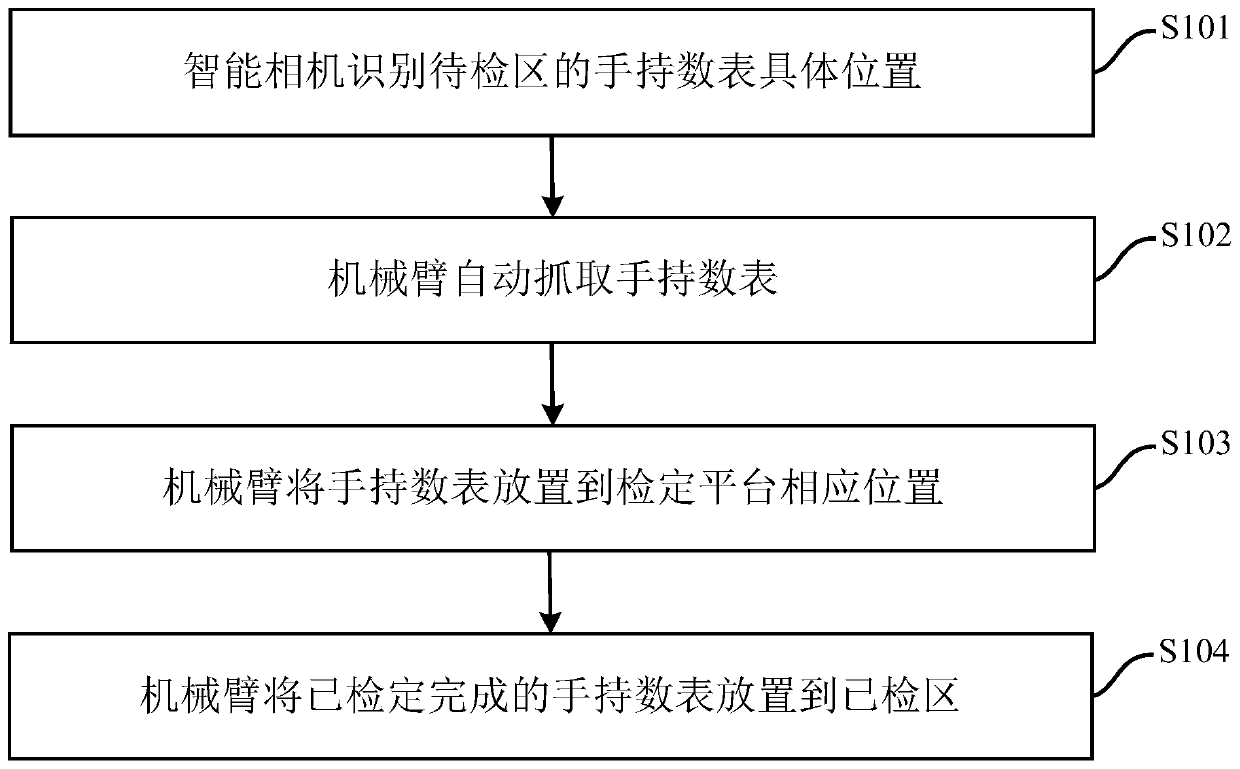
[0053] see figure 1 , which is a schematic diagram of an automatic identification and grabbing method provided in the embodiment of this application, the process may include:
[0054] S101, the smart camera identifies the specific location of the hand-held digital meter in the area to be inspected.
[0055] In the waiting area, there is a hand-held digital meter waiting for verification. Before the robotic arm automatically grabs the handheld digital meter, it must first identify the specific position of the handheld digital meter to be grabbed, so as to achieve accurate grabbing.
[0056] It should be noted that, in order to realize automatic recognition and grasping, a smart camera and a software gripper are fixed at the end of the robotic arm, and the fixing method can be fixed by special tooling or by other methods, which are not specifically limited in this application. .
[0057] Further, in order to realize automatic identification, the smart camera can communicate w...
Embodiment 2
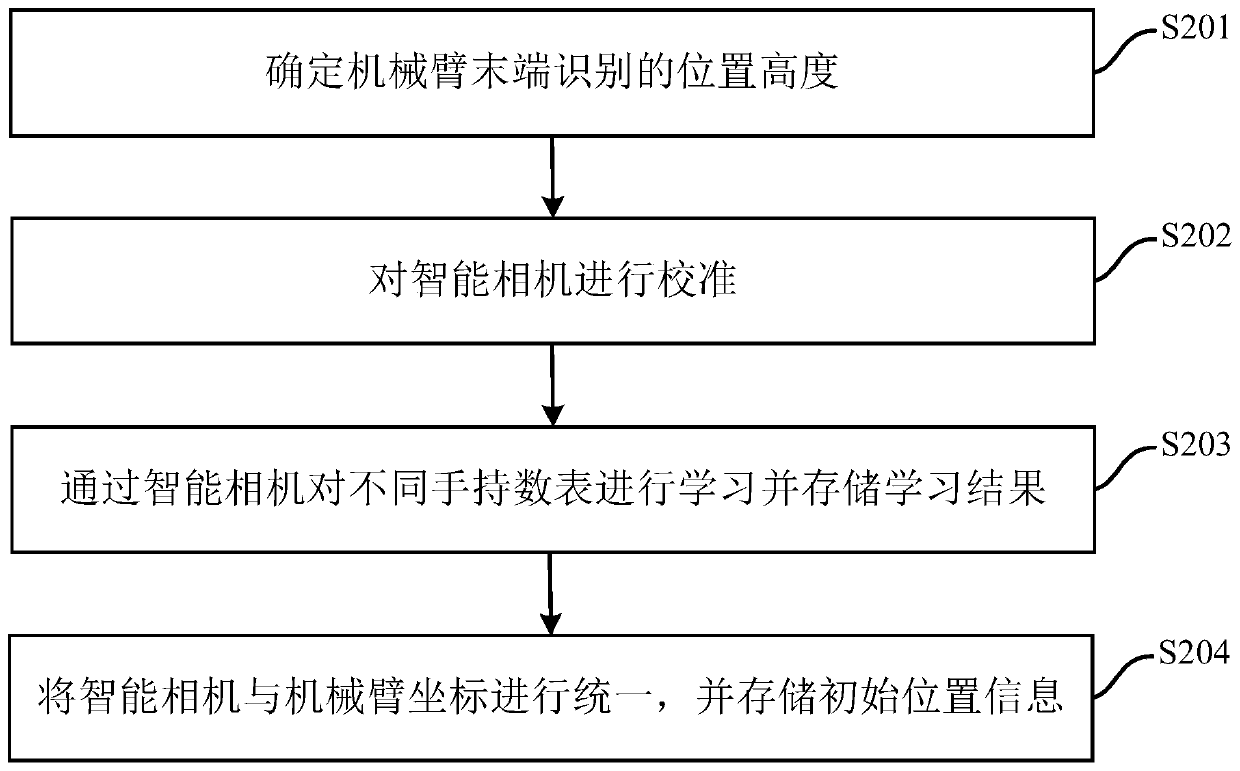
[0073] On the basis of Embodiment 1, the present application also provides an automatic identification and grabbing method, see figure 2 .
[0074] It should be noted that this embodiment includes all the methods and steps in the first embodiment, and for the sake of brevity, the steps in the first embodiment are not repeated here.
[0075] On the basis of Embodiment 1, further, the method for identifying the specific position of the hand-held digital meter in the area to be inspected in this embodiment specifically includes the following steps:
[0076] S201. Determine the height of the position recognized by the end of the robotic arm.
[0077] The same recognition object at different heights has different sizes for smart cameras. Therefore, the position height must be identified first for position calculation, and the moving distance of the manipulator is calculated according to the identification result.
[0078] S202. Calibrate the smart camera.
[0079] For the came...
Embodiment 3
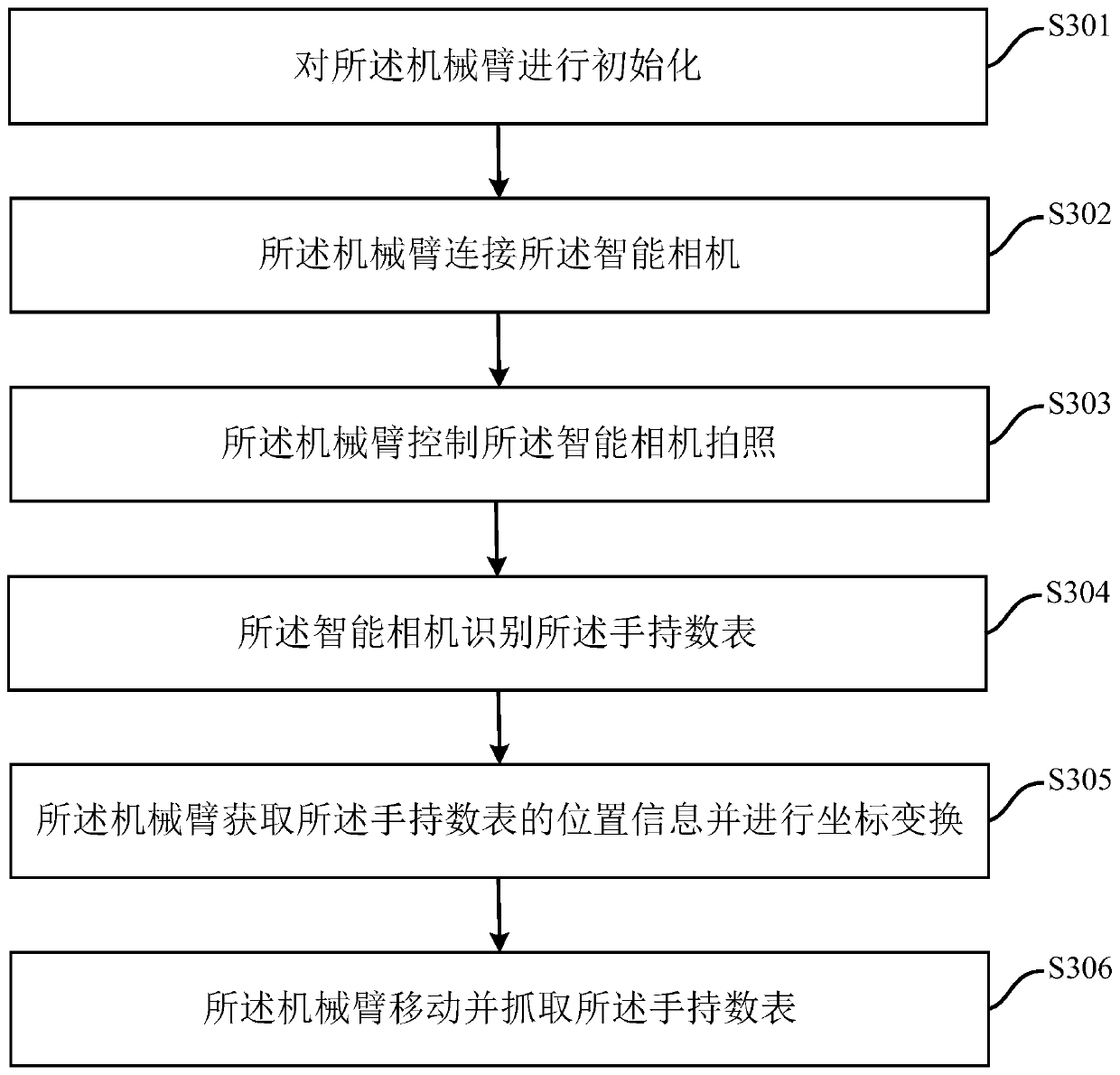
[0085] On the basis of Embodiment 1, the present application also provides an automatic identification and grabbing method, see image 3 .
[0086] It should be noted that this embodiment includes all the methods and steps in the first embodiment, and for the sake of brevity, the steps in the first embodiment are not repeated here.
[0087] The method provided in this embodiment does not specifically limit the type and model of the robotic arm, as long as it can be controlled by programming and can communicate with the smart camera.
[0088] Preferably, the robotic arm may be an Aobo robotic arm.
[0089] On the basis of Embodiment 1, further, the control process of the mechanical arm includes the following steps:
[0090] S301. Initialize the robotic arm.
[0091] Initialize the robotic arm before starting the grasping process.
[0092] S302. The robotic arm is connected to the smart camera.
[0093] After the robot arm is initialized, it establishes a connection with th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com