Heavy haul train sliding mode tracking control method with input saturation
A heavy-duty train, tracking control technology, applied in the direction of transportation and packaging, transportation center control system, electric vehicles, etc., can solve the problems of engineering application defects, large boundaries, and less research on compensation signal boundaries, so as to make up for defects, The effect of narrowing the boundaries and facilitating engineering applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] The present invention will be further described below in combination with specific embodiments.
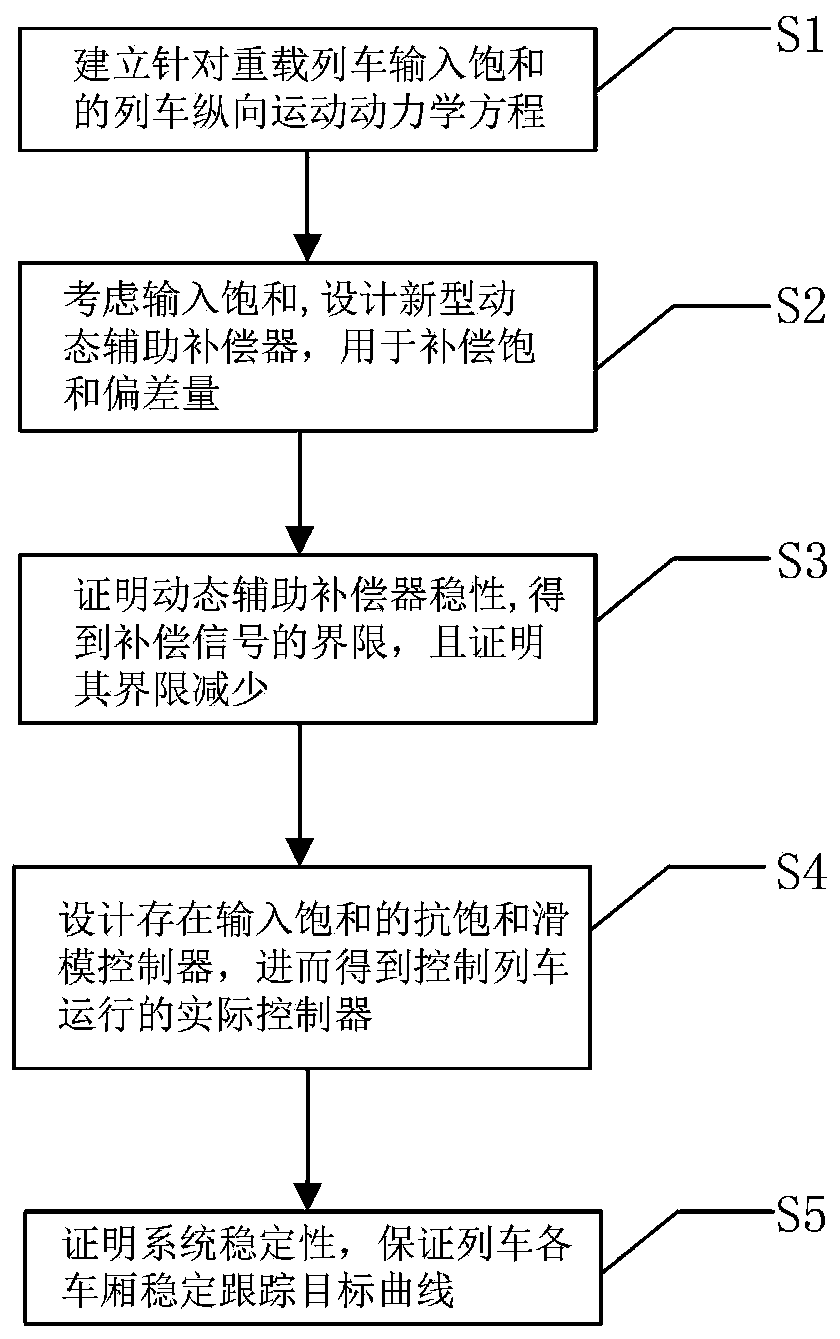
[0040] A sliding mode tracking control method for heavy-haul trains with input saturation, such as figure 1 shown; includes the following steps:
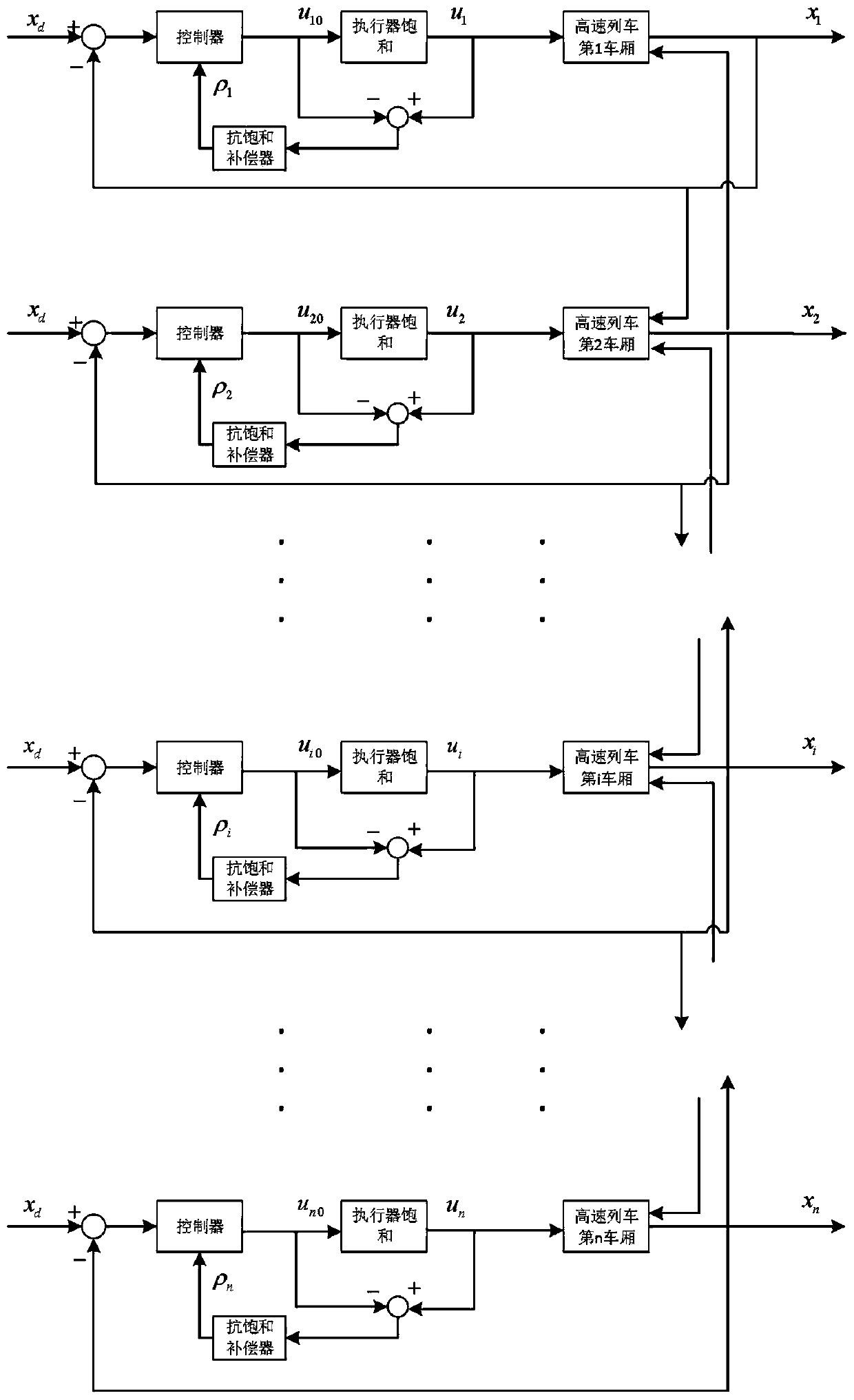
[0041] S1. Analyze the stress situation of the longitudinal motion of the heavy-duty train, establish the longitudinal motion dynamics equation aiming at the input saturation of the heavy-duty train, and obtain the train dynamics model; figure 2 as shown,
[0042] The dynamic equation of longitudinal motion is:
[0043]
[0044]
[0045]
[0046] Where, i=2,3···n-1, m i is the mass of the i-th carriage, x i and v i represent the displacement and velocity of the i-th car respectively, k i and h i are the elastic coefficient and damping coefficient of the i-th carriage, respectively.
[0047] The train dynamics model is:
[0048]
[0049] Among them, i=2,3···n-1, H i =1 / m i , d i =k i Δx i -k i-1 Δx i-1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com