Human-computer interface system for controlling mechanical arm
A human-machine interface and robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex programming interface, low efficiency, and high error rate, and achieve the requirements of improving work efficiency and reducing programming ability, The effect of simplifying operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
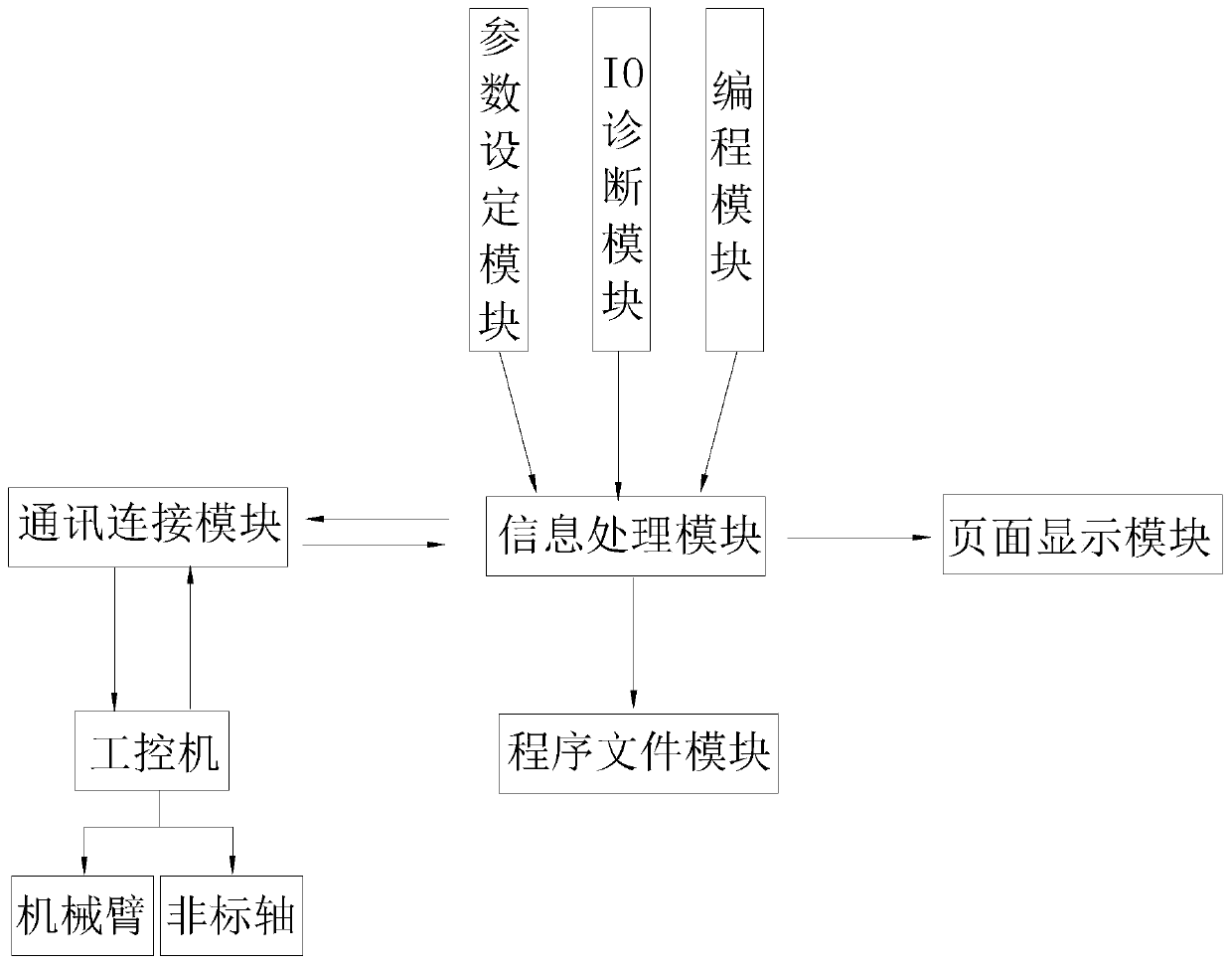
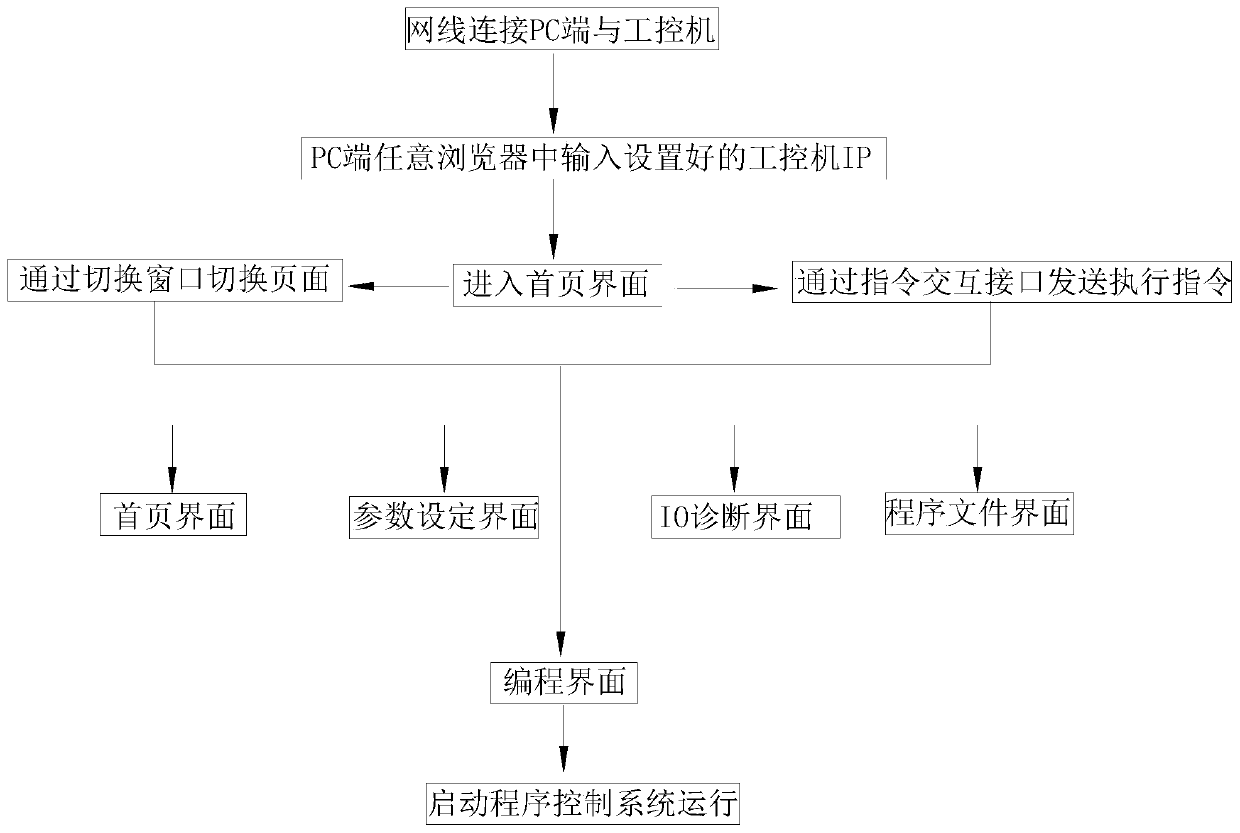
[0030] See attached Figure 1-2 As shown, a man-machine interface system for manipulator control of the present invention adopts GoogleBlockly graphical programming language, lua language analysis, and javascript is used for writing after analysis, and the bottom layer is based on linuxX86 architecture, and is written using C++ language. The man-machine interface system includes an information processing module, and the information processing module is respectively connected with a page display module, a communication connection module, a parameter setting module, a programming module, an IO diagnosis module, and a program file module.
[0031] The information processing module is used to receive and process the data transmitted by the communication connection module, the parameter setting module, the programming module, and the IO diagnosis module, and store the data information during processing into the program file module, and transfer the communication The status informat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com