A 3D configuration stitching method for large components based on laser vision sensing
A large-scale component and visual sensing technology, applied in the direction of optical devices, measuring devices, instruments, etc., can solve the problems of difficult to achieve online measurement, poor anti-interference ability, heavy workload, etc., achieve fast speed, small stitching error, good accessibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
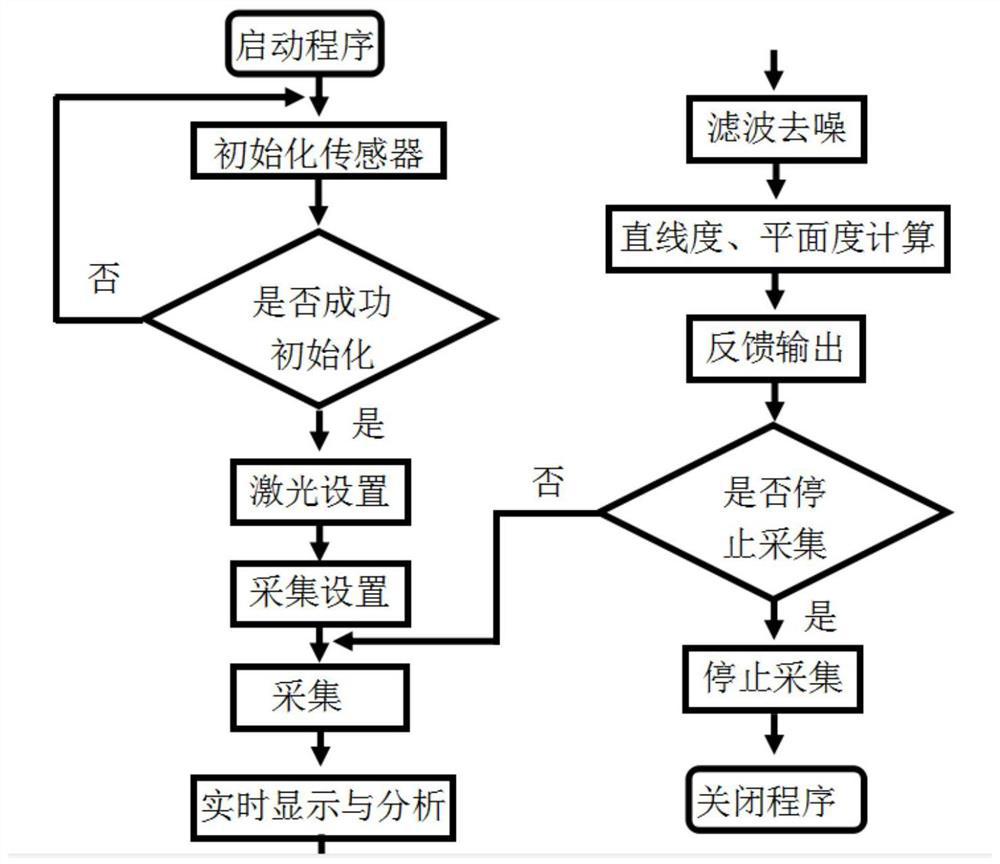
[0047] Specific embodiment one: a kind of large component three-dimensional configuration splicing method based on laser vision sensing of the present embodiment, it is carried out according to the following steps:
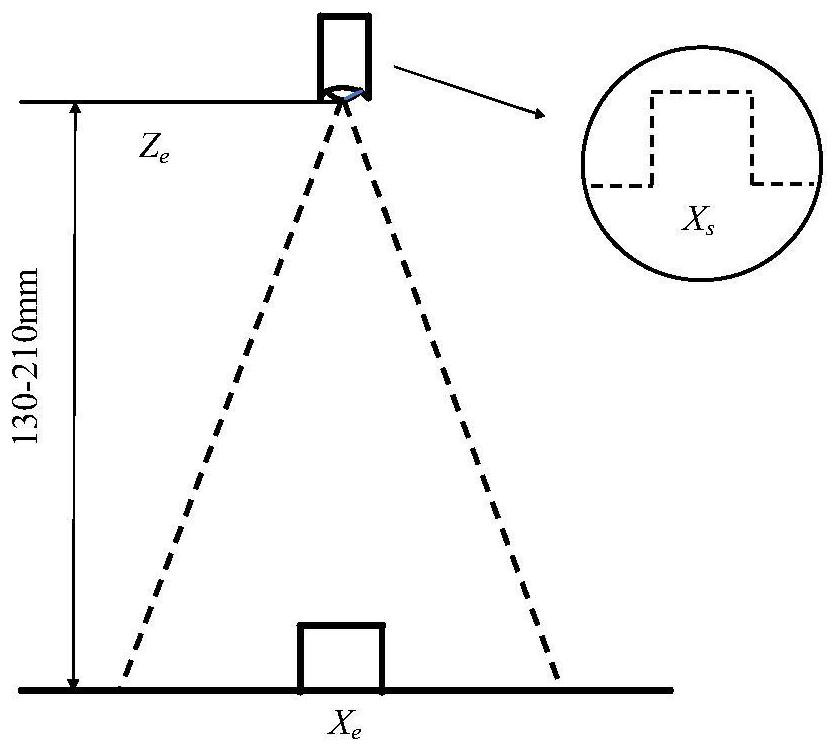
[0048] Step 1: Before measuring the contour of the profile, first calibrate the laser vision sensor, and restore the two-dimensional pixel image of the computer to the earth coordinates;
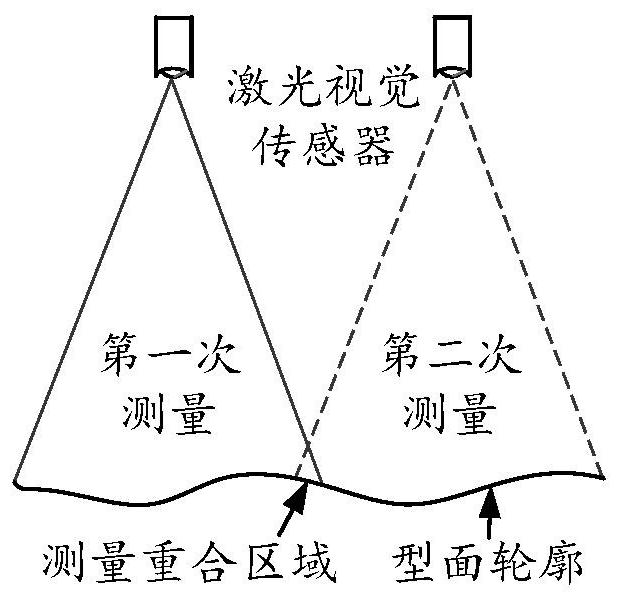
[0049] Step 2: Rigidly fix the laser vision sensor and the motion system to ensure that the sensor is always in the common working range during the motion process;
[0050] Step 3: Establish communication between the laser vision sensor and the PC controller, set sensor parameters, and set motion system parameters;
[0051] Step 4: The image scanning unit scans the profile image of the workpiece to be tested, and each scan obtains an array of 512 pixel points, the abscissa ranges from 0 to 511, the ordinate ranges from 0 to 1023, and the point array is in the abscissa Arranging...
specific Embodiment approach 2
[0070] Embodiment 2: This embodiment differs from Embodiment 1 in that the filtering algorithm is mean filtering, median filtering, Hamming filtering, quadratic filtering or bell-shaped filtering.
[0071] Others are the same as in the first embodiment.
specific Embodiment approach 3
[0072] Embodiment 3: The difference between this embodiment and Embodiment 1 is that the laser vision sensor is a linear laser sensor. Others are the same as in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com