Stereoscopic track changing type track robot system and method
A technology of orbital robots and robots, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to realize three-dimensional space movement, the space resources occupied by moving orbits, and the waste of production costs, so as to improve inspection coverage and reduce The effect of layout cost and space resource saving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0035] In a typical implementation of the present invention, a three-dimensional track-changing orbital robot system is disclosed, which can realize the track-changing requirements of the orbital robot in the horizontal direction, the vertical direction, and the direction of rotation at a certain angle;
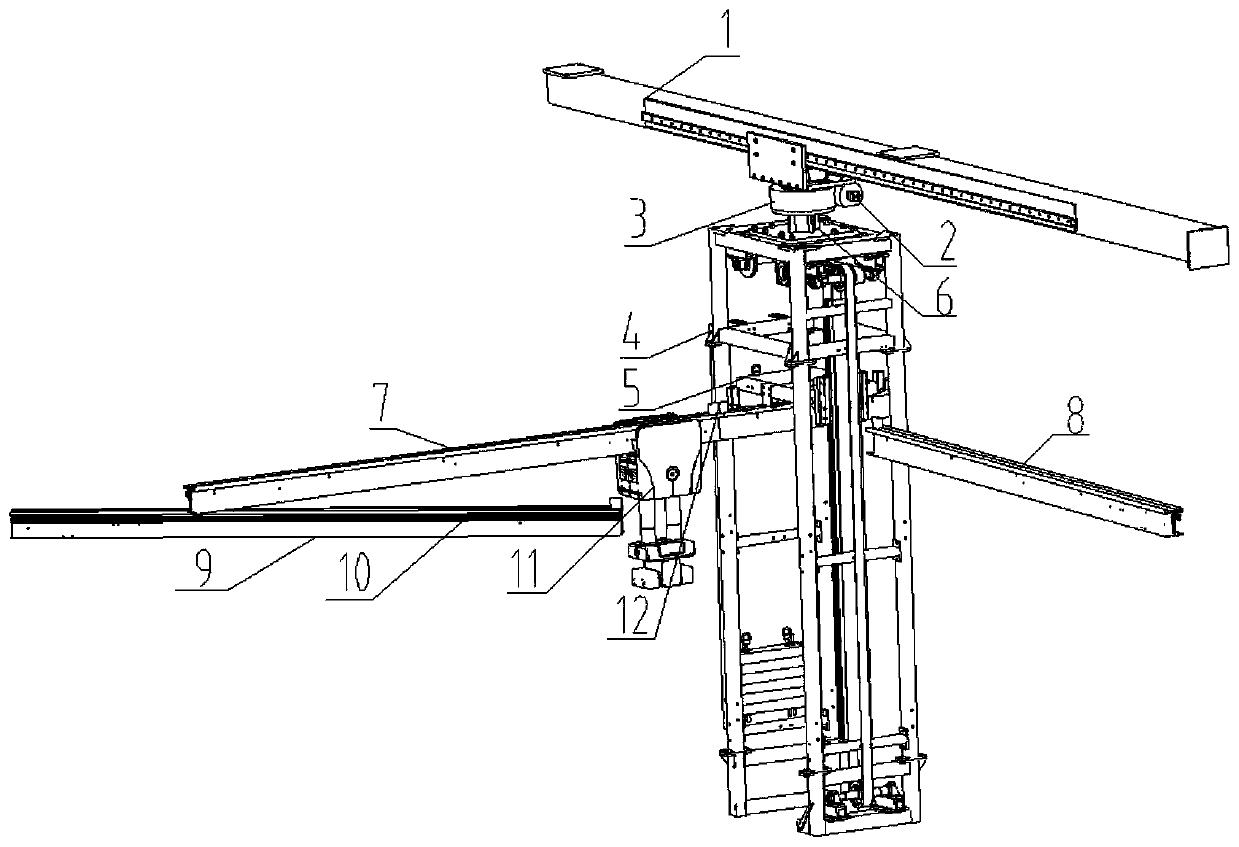
[0036] Structural reference of three-dimensional track-changing orbital robot system figure 1 , including: several sections of moving tracks arranged on different planes in a three-dimensional space, a robot 11 capable of moving on the moving tracks, a three-dimensional track changing device and a control system;
[0037] The moving track is laid out according to the position that the robot needs to reach. The three-dimensional track changing device includes a robot transfer mechanism, and a transition track is set on the robot transfer mechanism; the control system controls the lifting, turning and movement of the set direction of the robot transfer mechanism to make the tran...
Embodiment 2
[0064] In one or more embodiments, a control method of a three-dimensional track-changing track robot system is disclosed, including:
[0065] Set up the transition track, and make the transition track dock with the original track by driving the horizontal, rotary or lifting movement of the transition track;
[0066] Control the robot to walk to the set position on the transition track and fix it;
[0067] According to the position of the track changing track, the transition track is docked with the track changing track by driving the horizontal, rotary or lifting movement of the transition track;
[0068] Release the fixation of the robot, and control the robot to walk on the track of changing track.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com